 Skip to content
Skip to content UAV Controller
Controller stabilizes and controls a UAV for semi-autonomous and autonomous flights. It is one of the core components of a UAV. Primarily consists of a microcontroller, control circuit & a suite of sensors (gyroscope, accelerator,
electronic compass, barometer, etc.). It has redundant sensors & power supplies and performs
redundant switching in case of failure to ensure flight safety.
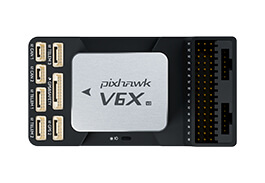
Pixhawk V6X V2, a brand-new upgraded masterpiece developed through our in-depth collaboration with PX4, inherits Pixhawk FMU vox standard and modular design philosophy. It features a full upgrade of industrial-grade triple-redundant series sensors paired within dependent bus and power supply designs, adds a high-precision constant-temperature external clock and MCU heat dissipation system, and introduces 5V PWM support along with a patented shock absorption structure. The standard-equipped PMU 2 Lite power management module supports 70V input and 220A current detection, meeting the requirements of “high reliability, high adaptability, and high performance” for high-end industrial-grade unmanned systems.
- Dual-FPU H7 Processor, Running at 480 MHz
- New Dual Industrial-Grade IMU Redundancy Design
- Laminated Design, Compact Size, and Rich Interfaces
- Integrated Ethernet Interface for Communication with On-Board Computers
- Supports 5V/3.3V Configurable PWM Output
- Compatible with ArduPilot and PX4 Firmware

X25 EVO is a brand-new high-performance industrial-grade controller from CUAV. Compared with traditional controllers, X25 EVO has achieved breakthrough upgrades and optimization in aspects such as power rails, sensors, shock absorption systems, temperature compensation systems, hardware reliability and device compatibility, significantly improving its performance and stability in complex environments and meeting the application needs of various unmanned system.

X7+ Pro controller adopts STM32H743 processor, with processing speed up to 480MHz, 1M storage and 2M flash memory, built-in 3 sets of latest Invensense + Bosch + TE series combined sensors and industrial RM3100 compass, with better stability and anti-interference, with CUAV patent shock absorption design and temperature compensation system,X7 pro also uses car gauge ADIS16470 sensor to further improve flight stability.

X7+ is a premium controller designed and produced by CUAV. It adopts the STM32H7 series processor, which has higher performance than Pixhawk FMU v5x, and integrates high-precision industrial-grade sensors and ultra-low-temperature drift sensors. It supports ArduPilot & PX4 firmware. The X7+ series has better stability and immunity to interference.

Nora+ controller adopts STM32H743 processor, with processing speed up to 480MHz, 1M storage and 2M flash memory, built-in 3 sets of latest Invensense + Bosch + TE series combined sensors and industrial RM3100 compass, with better stability and anti-interference, with CUAV patent shock absorption design and temperature compensation system.Nora adopts Integrated Design and the classic side outlet interface design.
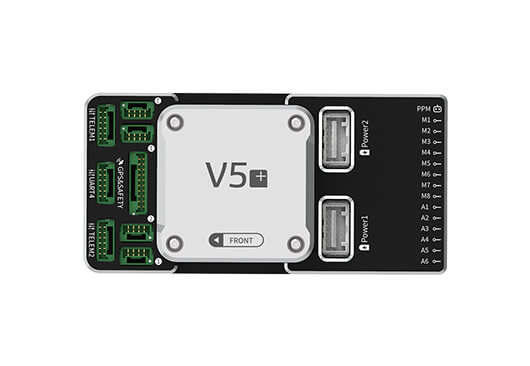
V5 +®CUAV®Advanced controller designed jointly with PX4 team and manufactured by CUAV. It is based on Pixhawk FMUv5 design standards and is perfectly compatible with PX4 and ArduPilot firmware. The separated design can support user customize baseboard.

V5 nano®CUAV®The PX4 team is designed for enterprises or enthusiasts who are extremely sensitive to space but want to acquire V5 powerful functions. It is based on Pixhawk FMUv5 design standards and is perfectly compatible with PX4 and ArduPilot firmware. The price-performance ratio is extremely high.
How to Distinguish Between Different Controllers
CUAV Products | X25 EVO | 7-Nano | V6X | X7+ Pro | X7+ | Nora+ | V5+ |
| Design Standard | CUAV X25 | / | Pixhawk FMU v6x | CUAV X7 | CUAV X7 | CUAV X7 | Pixhawk FMU v5 |
| Main Processor | STM32H753 | STM32H753 | STM32H753 | STM32H743 | STM32H743 | STM32H7x3 | STM32F765 |
| Co Processor | / | / | STM32F103 | / | / | / | STM32F103 |
| Acce & Gyro | IIM-42653 IIM42652 IIM42653 (External High- Precision Clock) | IIM-42652 BMI088 | ICM-42688-P ICM-20649 BMI088 | ADIS16470 ICM-42688-P ICM-20689 | ICM-42688-P ICM-20689 ICM-20689 | ICM-42688-P ICM-20689 ICM-20689 | ICM-20689 ICM-20602 BMI055 |
| Compass | RM3100 | IST8310 | RM3100 | RM3100 | RM3100 | RM3100 | IST8310 |
| Barometer | ICP-20100 / BMP581 | ICP-20100 / BMP581 | ICP-20100 × 2 | MS5611 × 2 | MS5611*2 | MS5611 × 2 | MS5611 |
| UART Serial Port | 7 | 5 | 7 | 5 | 5 | 5 | 5 |
| Servo OUT | 16 | 14 | 16 | 14 | 14 | 14 | 14 |
| 5V PWM | Support | Support | / | / | / | / | / |
| Power IN | DroneCAN Digital Power Interface×2 (Default: CAN PMU 2 Lite) | ADC Analog Power Port × 1 | DroneCAN Digital Power Interface×2 (Default: CAN PMU Lite) | DroneCAN Digital Power Interface + ADC Analog Power Port (Default: CAN PMU Lite) | DroneCAN Digital Power Interface + ADC Analog Power Port (Default: CAN PMU Lite) | DroneCAN Digital Power Interface + Analog Power Port (Default: CAN PMU Lite) | ADC Analog Power Port × 2 |
| USB Port | Type-C | Type-C | Type-C × 1 | JST GH1.25 × 1 | Type-C | Type-C | Type-C × 1 | JST GH1.25 × 1 | Type-C |
| TELEM | 3 | 2 | 3 | 2 | 2 | 3 | 2 |
| Ethernet | 1 | 1 | 1 | / | / | / | / |
| Internal Shock Absorption | 4th-Gen Tilt-Symmetric Damping Shock Absorption | / | Tilt-Symmetric Damping Shock Absorption | Patented Shock Absorption | Patented Shock Absorption | Patented Shock Absorption | Patented Shock Absorption |
| Temperature Compensation (Heating) | Dual Temperature Compensation | / | IMU Heating | IMU Heating | IMU Heating | IMU Heating | / |
| Weight | 110 g | 33.8 g | 99 g | 103 g | 101 g | 91 g | 91 g |
| Size | 76.5 × 45.45 × 32.2 mm | 31.8 × 30.7 × 25.75 mm | 90 × 45.0 × 29.2 mm | 77 × 45.5 × 39 mm | 77 × 45.5 × 39mm | 64 × 46 × 22 mm | 85.5 × 42.5 × 33 mm |
