 Skip to content
Skip to content Introduction: Addressing the Core Challenges in Modern Autonomy
The landscape of unmanned systems is evolving from prototype-driven projects to full-scale commercial deployment. In sectors ranging from hydrographic surveying and precision agriculture to infrastructure inspection and academic research, the demand for robust, reliable, and high-performance control systems is paramount. Developers, engineers, and system integrators face a constant challenge: finding a flight controller that delivers industrial-grade reliability without sacrificing the flexibility and openness required for innovation.
CUAV rises to this challenge with the 7-Nano Controller. This isn’t merely an incremental update; it’s a purpose-built computational core designed for the next generation of autonomous vehicles—Unmanned Aerial Vehicles (UAVs), Unmanned Surface Vessels (USVs), ROVs, and beyond. Engineered with a rigorous, professional ethos, the 7-Nano provides the stability, processing power, and connectivity that form the foundation of mission-critical systems.
This technical deep dive explores how the CUAV 7-Nano empowers developers to push the boundaries of what’s possible.
7-Nano is compact yet powerful, compatible with a variety of hulls. It provides an efficient and stable control core for unmanned vessels, ensuring reliable and stable exploration of every water area.
Computational Architecture: Double floating point H7 processor
The central nervous system of the 7-Nano is the ARM Cortex-H7 processor, clocked at 480 MHz, and featuring a dual-precision Floating-Point Unit (FPU). For the engineering-minded, this architecture translates into tangible performance benefits for complex autonomous systems.
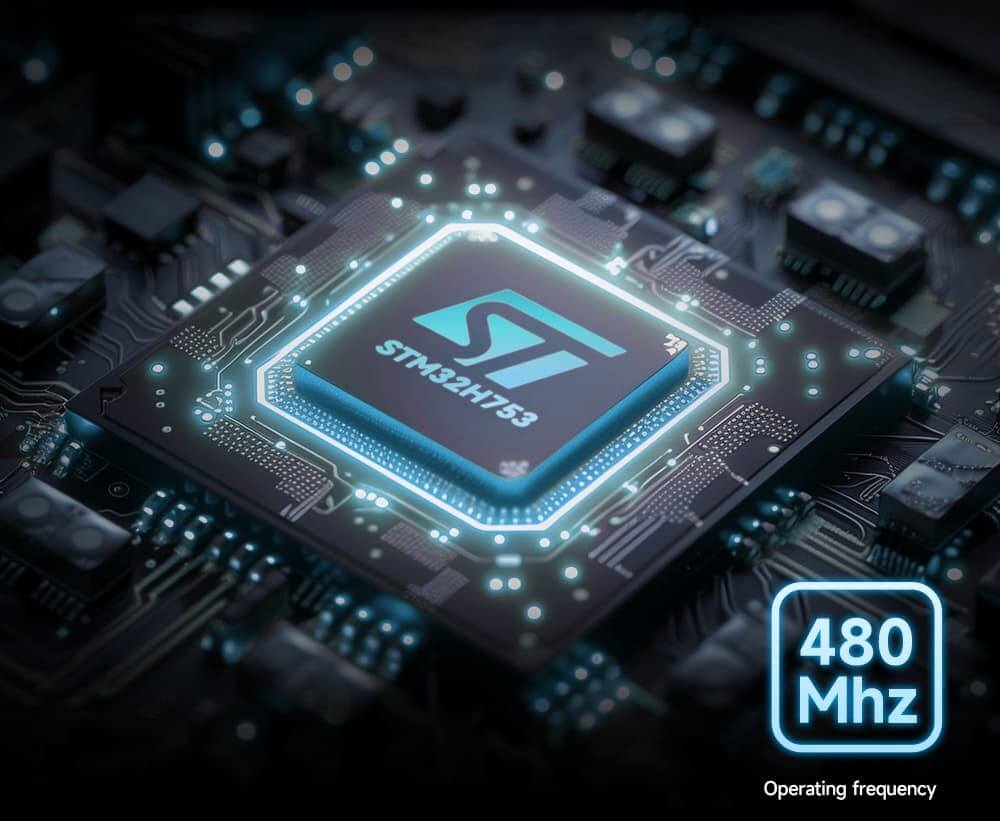
- High-Frequency Processing & Deterministic Timing: The 480 MHz clock speed ensures that the autopilot stack (e.g., PX4, ArduPilot) has ample headroom to execute its primary control loops at high frequencies. This results in lower latency between sensor measurement and actuator response, which is critical for stabilizing a UAV in turbulent wind or a USV in choppy water.
- Dual FPU for Computational Throughput: The inclusion of a dual FPU is a strategic differentiator. Many sensor fusion algorithms (Kalman Filters), navigation routines, and control logic operations rely heavily on floating-point arithmetic. A dual FPU allows the processor to execute two such operations in parallel per cycle. This dramatically accelerates these mathematically intensive tasks, freeing up CPU cycles for other processes like log recording, parameter management, or companion computer communication. The result is a system that feels more responsive and can handle more complex filtering and estimation algorithms without dropping cycles.
Supporting this powerful CPU is 2MB of Flash memory. This generous storage capacity accommodates the entire feature set of modern open-source flight stacks, along with custom mission logic and future firmware expansions, ensuring the hardware platform remains relevant through software updates.
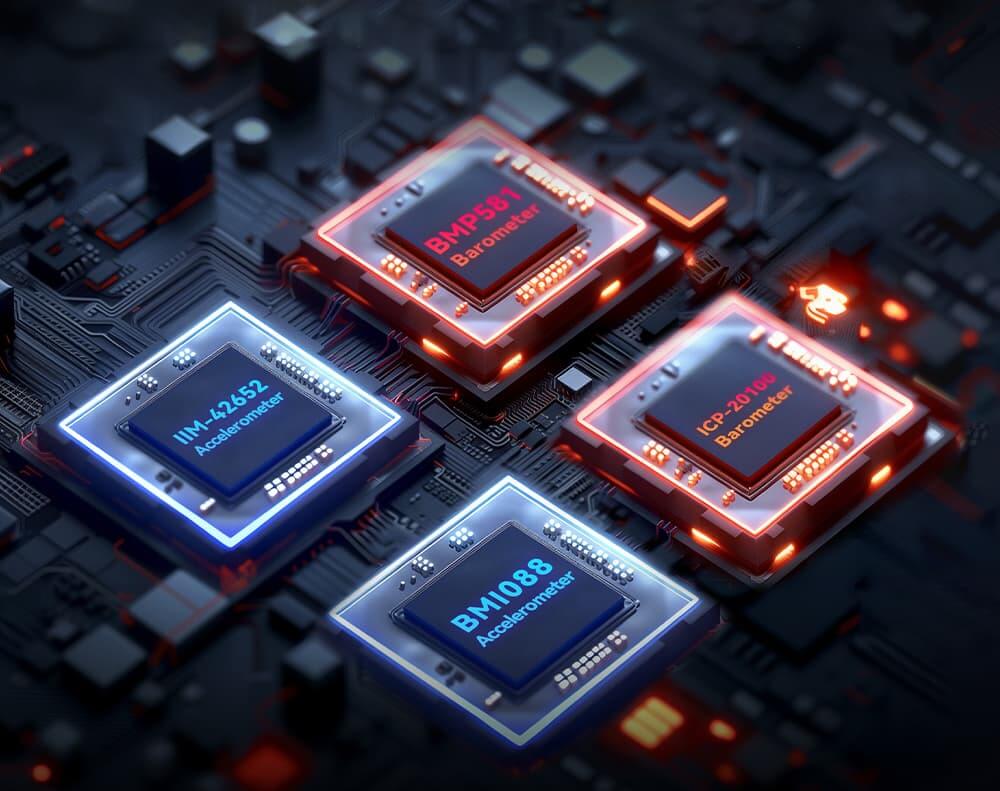
Foundational Reliability: Dual Industrial-Grade IMU Redundancy
In commercial and research applications, system failure is not an option. The Inertial Measurement Unit (IMU) is arguably the most critical sensor for estimating vehicle attitude. A single point of failure here can lead to catastrophic outcomes.
CUAV 7-Nano implements a hardware redundancy strategy with its dual industrial-grade IMUs. This design is a cornerstone of its reliability engineering.
Fault Detection, Isolation, and Recovery (FDIR): The system continuously monitors the health and output of both IMUs. Advanced voting algorithms and consistency checks are employed to detect discrepancies, drift, or hard failures in real-time.
Seamless Failover: Upon identifying a fault in the primary IMU, the system automatically and instantaneously switches control to the secondary IMU. This transition is designed to be bumpless, preventing any disruptive jerk or control transient that could destabilize the vehicle. This level of redundancy is essential for Beyond Visual Line of Sight (BVLOS) operations, flight over water, or operations in proximity to people or infrastructure.
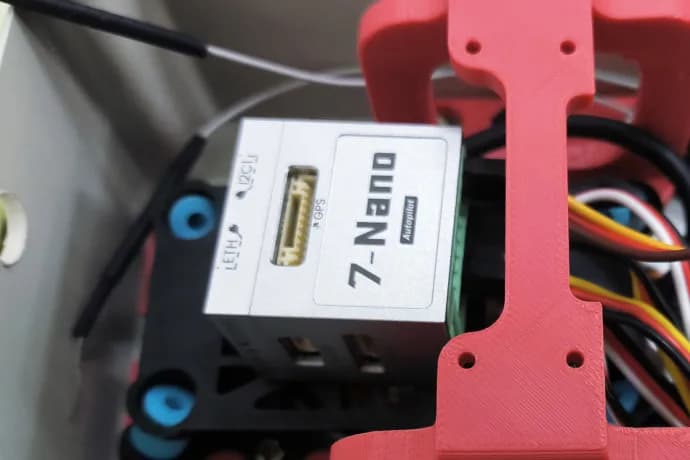
Form Factor and System Integration: Highly integrated stacked design, exquisite and compact
The “Nano” nomenclature accurately reflects the board’s physical philosophy: maximum functionality in a minimal volume. This is critical for SWaP (Size, Weight, and Power)-constrained applications.

Optimized Spatial Efficiency: The compact, stacked design allows for integration into tight airframes, pressure vessels for UUVs, or the confined hulls of small USVs. This enables the use of a high-performance controller in platforms where it was previously impossible.
Comprehensive Connectivity Suite: Despite its size, the 7-Nano does not compromise on interfacing capabilities. It provides a full suite of communication peripherals:
Multiple UART/Serial Ports: For connecting GPS modules, telemetry radios, distance sensors, and other serial devices.
CAN Bus Interface: Essential for connecting to CAN-based ESCs, power modules, and other sensors in a robust, multi-node network.
I2C & SPI Buses: For connecting a wide array of ancillary sensors, such as barometers, airspeed sensors, or additional IMUs.
Practical Design for Clean Integration: The side-exit wiring harness is a considered design choice that simplifies installation, improves cable management, reduces strain on connectors, and contributes to overall system reliability by minimizing potential snag points.
Actuator Interface Flexibility: Configurable 5V/3.3V PWM Outputs
Commanding servos, ESCs, and other actuators requires a robust signaling interface. The 7-Nano provides software-configurable PWM outputs at both 5V and 3.3V logic levels, addressing a common integration pain point.
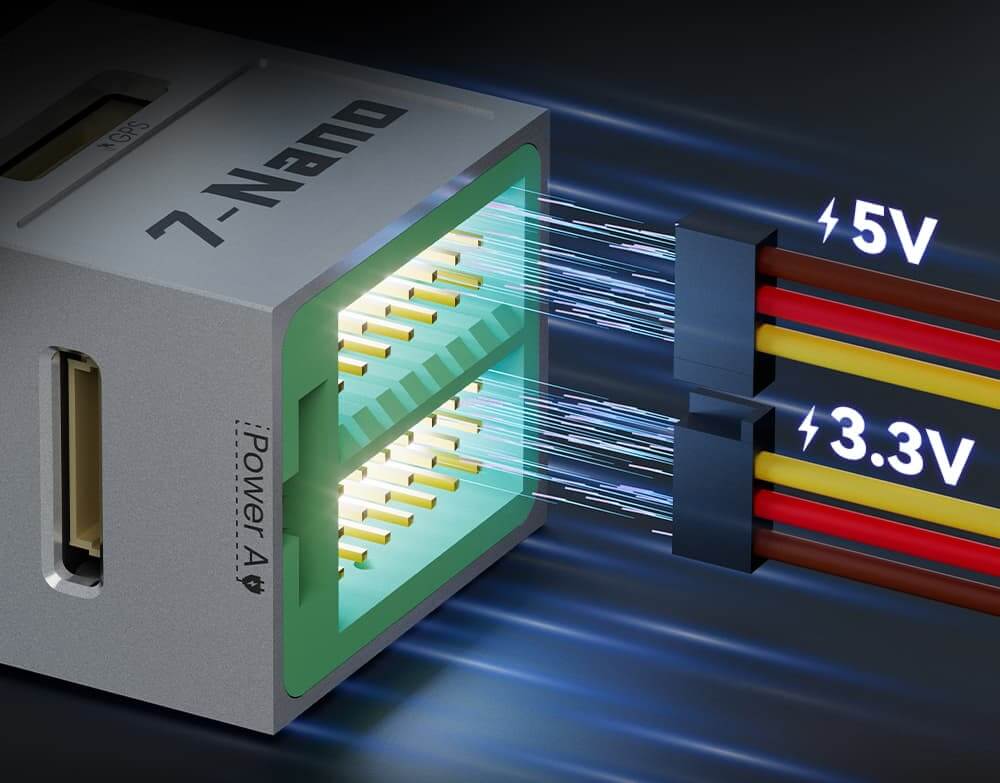
-
3.3V Logic Level Compatibility: This is the standard for modern embedded systems, including many companion computers (NVIDIA Jetson, Raspberry Pi) and digital servos. Native 3.3V support ensures clean signaling without the need for external level shifters, reducing component count and potential failure points.
-
5V Logic Level for Noise Immunity: In larger vehicles with extended cable runs, signal integrity can degrade due to electromagnetic interference and voltage drop. The 5V PWM option provides a higher noise margin, ensuring that control signals arrive at the actuator with integrity, preventing jitter or signal loss.
Data and Network Infrastructure: Integrated Ethernet Interface
Moving beyond basic telemetry, the integrated Ethernet port unlocks advanced capabilities crucial for modern robotic systems.
High-Bandwidth Companion Computer Link: Ethernet provides a low-latency, high-throughput connection to an onboard companion computer. This is indispensable for applications involving real-time computer vision, LiDAR processing, or complex AI model inference. The flight controller handles the low-level stabilization and control, while the companion computer streams processed data and high-level commands over the reliable Ethernet link.
Swarm Communication Backbone: For multi-agent systems, Ethernet can be used to create a low-latency local network, enabling direct vehicle-to-vehicle (V2V) communication for coordinated task execution and collision avoidance.
Direct Payload Integration: Facilitates the connection of high-data-rate payloads like high-resolution gimbals, multibeam sonars, or hyperspectral cameras, allowing for seamless data streaming to onboard storage or computing units.
The Software Ecosystem: Native ArduPilot & PX4 Firmware Support
The hardware’s potential is fully realized through its seamless support for the leading open-source autopilot platforms: ArduPilot and PX4. This is a critical strategic advantage.

Leveraging Community and Commercial Innovation: By supporting both ecosystems, CUAV ensures that developers are not locked into a single software path. They can choose the platform that best aligns with their project’s requirements, leveraging the global developer community’s continuous innovations, extensive documentation, and proven vehicle types (Multicopter, Fixed-Wing, VTOL, USV, UGV, ROV).
Accelerated Development Cycles: The ability to use these mature, feature-rich firmware stacks drastically reduces development time, allowing teams to focus on application-specific payloads and mission logic rather than low-level control code.
7-Nano Controller Main Specifications
| Main Parameter | |
| Processor | STM32H753(Arm Cortex -M7,480MHz, 2MB FLASH) |
| Sensors | |
| Acce&Gyro | IIM-42652/BMI088 |
| Compass | IST8310 |
| Barometer | ICP-20100/BMP581 |
| Interfaces | |
| I2C | 3 |
| PWM OUT | 14 (Configurable for 3.3V / 5V) |
| RC IN | 1 (Support PPM SBUS DSM) |
| RSSI | PWM or 3.3V analog voltage |
| CAN BUS | 2 |
| Power IN | 1 |
| Safety Switch | 1 |
| GPS 2 | 1 |
| ADC | ADC3.3 & ADC6.6 |
| DEBUG | 1 |
| USB | Type-C |
| Ethernet | 1 |
| Rated Voltage | 4.5 ~ 5.5 V |
| USB Voltage | 4.75 ~ 5.25 V |
| Servo Voltage | 0 ~ 10 V |
| Working Temp | -20 ~ 85 ℃ |
| Humidity | 5% ~ 95%(Does not condense) |
| Size | 30.75 × 31.80 × 25.75mm |
| Weight | 33.8g |
| 7-Nano PDB Power Module | |
| Rated Voltage | 12 ~ 70 V |
| Detection Current(MAX): | 79.2 A |
| BEC OUT | 5.3V / 4A |
| Voltage and Current Accuracy | ±0.2V / 0.5A |
| Splitter | Divided into six |
| Interfaces | XT60 / GH1.25 6Pin |
| Weight | 17g |
Application-Specific Solutions
CUAV 7-Nano versatility makes it the ideal choice for a broad spectrum of professional applications:
Academic & University Research: Provides a reliable, open-source platform for research in control theory, multi-agent systems, and autonomous navigation algorithms.
Commercial UAV Services: Powers reliable drones for surveying, mapping, agricultural spraying, and infrastructure inspection, where day-in, day-out reliability is key to profitability.
Marine & Aquatic Systems: Serves as the stable control core for USVs performing bathymetry, water quality monitoring, and port security.
System Integrators & OEMs: Offers a trusted, high-performance component for building branded robotic solutions for various vertical markets.
Conclusion: Partner with CUAV for Your Autonomy Engineering Success
CUAV 7-Nano is more than a component; it is a testament to a commitment to engineering excellence. It delivers the computational power, fault-tolerant design, and professional connectivity required to transition advanced autonomous systems from the lab to the field. For developers, researchers, and integrators, it represents a lower-risk, higher-performance foundation upon which to build the future of robotics.
Join the CUAV Global Partner Network.
We are seeking qualified distributors and resellers to bring our professional-grade controllers to markets worldwide. Apply for a partnership to access distributor pricing, marketing resources, and technical training.
