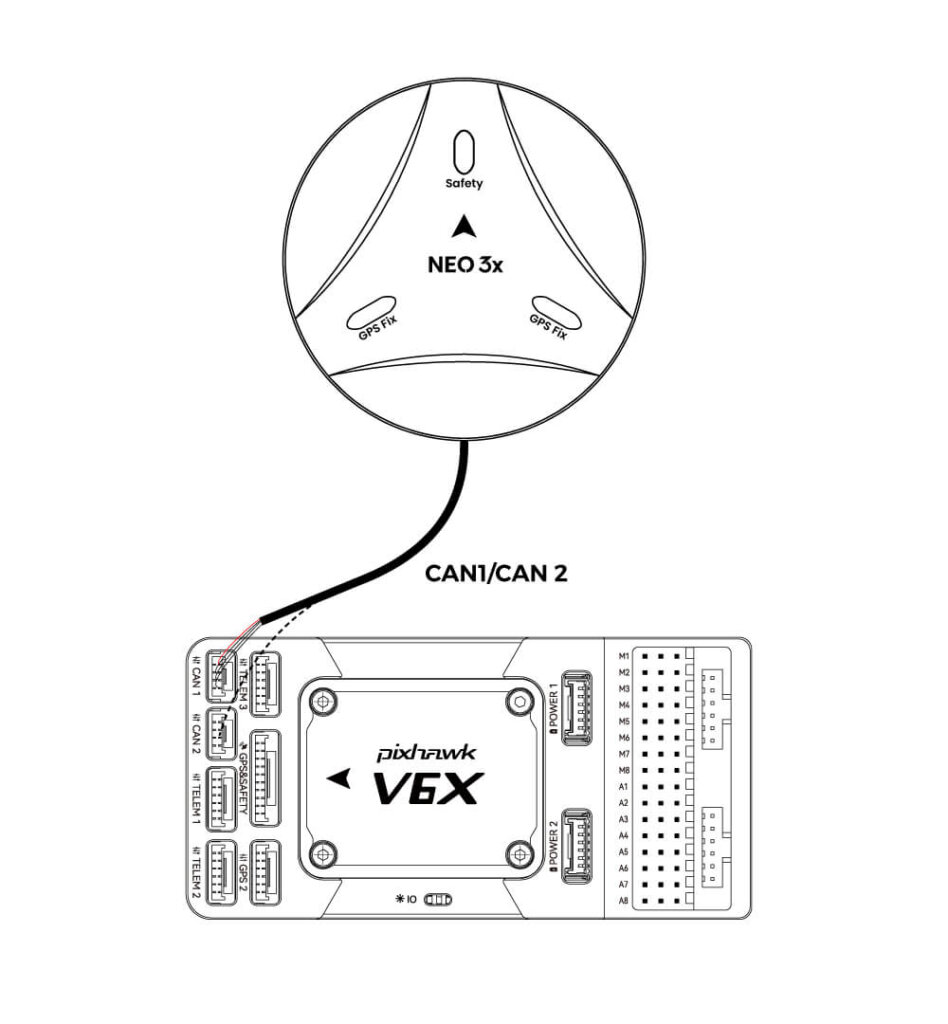
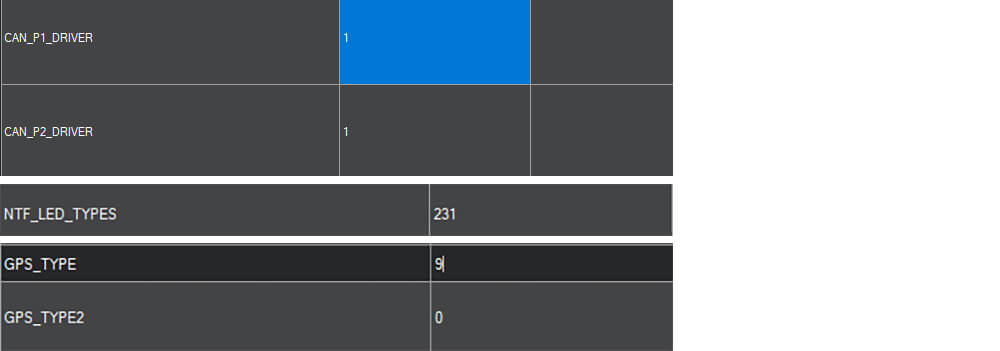
NEO 3X GPS Module Parameters and Interfacing Instructions
NEO 3X is a GNSS receiver with IP66 protection. It supports four-star system integration and features a variety of built-in waterproof and dustproof structural designs and materials to meet requirements in various environments. It has a built-in STM32F4 series processor, ICP2100 barometer, Ublox M9N module, and RM3100 industrial-grade compass, and supports DroneCan protocol.
Note
ArduPilot 4.0 and higher firmware fully supports NEO 3X.
Features
IP66 dustproof and waterproof design, adaptable to complex environments.
Integrated Ublox new generation GNSS module (NEO-M9N).
Supports simultaneous reception of GPS, Galileo, GLONASS, and Beidou satellite systems.
DroneCAN standard protocol, high real-time performance, and strong anti-interference ability