| | Basic parameters |
| Satellite receiver | U-blox MIA-M10Q |
| Processor | STM32H5 Arm® Cortex®-M33 250 MHz |
| Compass | IIS2MDC |
| Frequency Band | GPS: L1 C/A
GLONASS: L1OF
BEIDOU: B1I/B1C
Galileo: E1B/C
QZSS: L1 C/A L1S |
| Augmentation systems | SBAS: EGNOS, GAGAN, MSAS, WAAS, BDSBAS, KASS, and SouthPAN
QZSS: L1S (SLAS) |
| Number of Concurrent GNSS | 4(BeiDou, Galileo, GLONASS, GPS) |
| Oscillators | TCXO |
| Acquisition | Cold Start: 27s
Hot Start: 1s
Aided Start: 1s |
| Sensitivity | Tracking and nav:-167dBm
Reacquisition: -160dBm
Cold start:-148dBm
Hot star: -159dBm |
| Nav. Update Rate | Default:5Hz,
Up to 10Hz(four satellite system)
Up to 25Hz(single satellite system) |
| Horizontal Position Accuracy | 1.5m CEP |
| Signal Integrity | RF interference and jamming detection and reporting, Spoofing detection and reporting |
| Wave filtering | SAW+LNA+SAW+LNA |
| Anti-Electromagnetic/radio frequency interference | EMI+RFI |
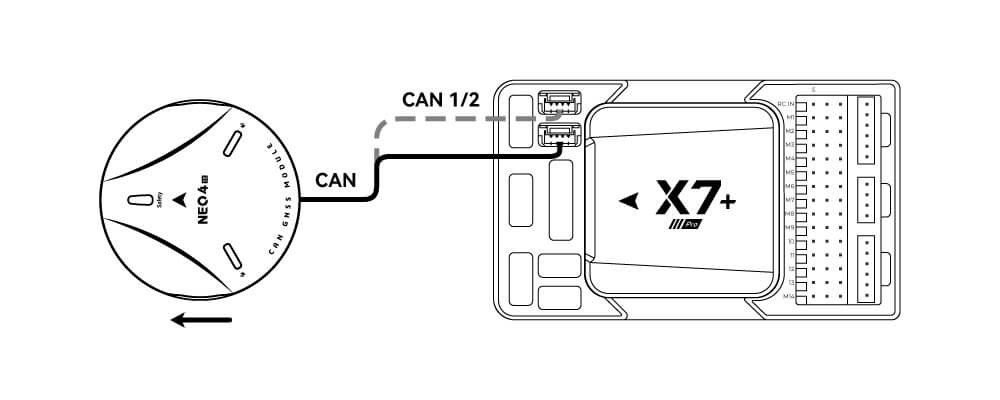
| Protocol | DroneCAN |
| Upgrade Firmware | Support |
| Firmware | CUAV M4C GNSS |
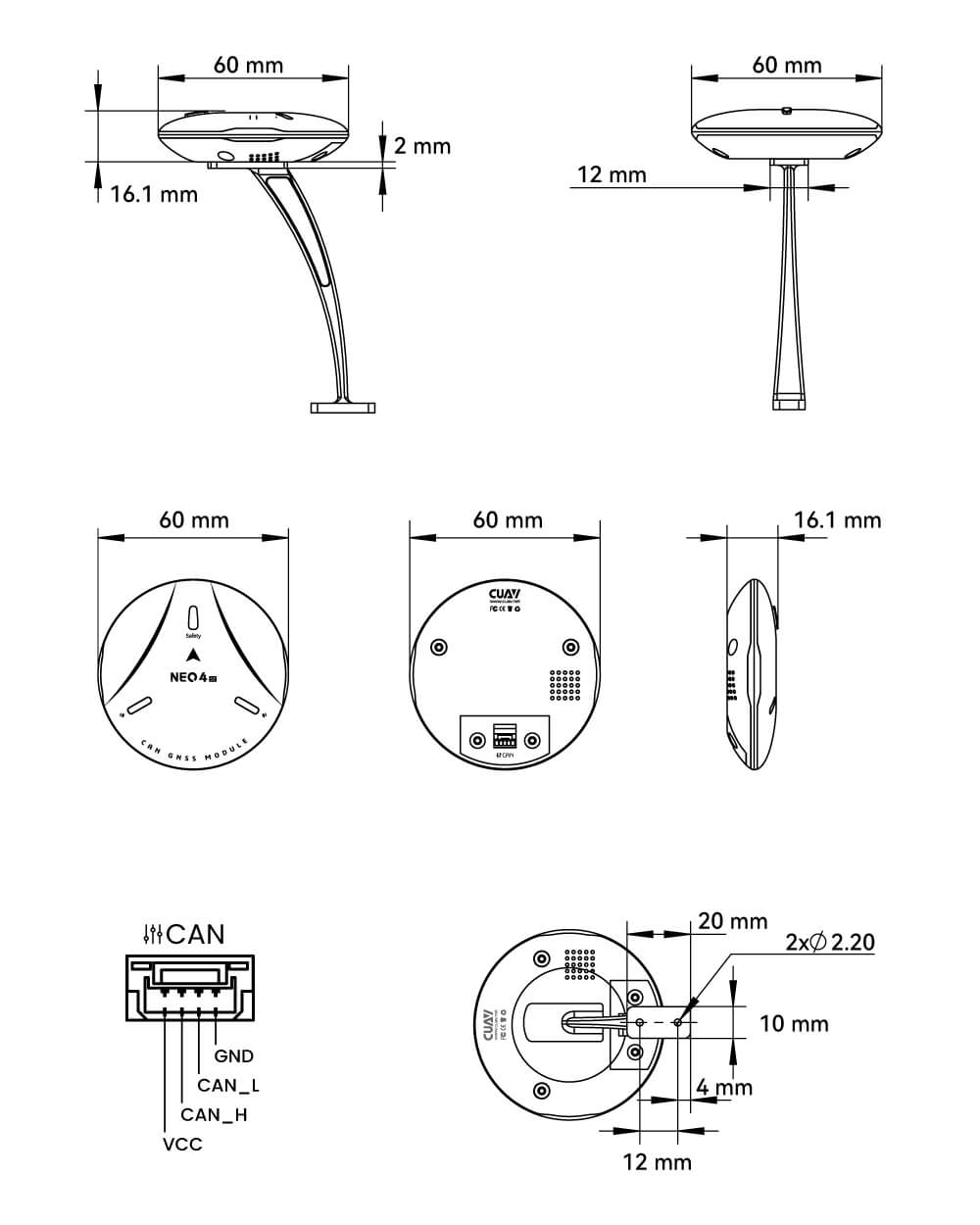
| Data Interface | GHR-04V-S |
| Size | 60mmx60mmx16.1mm |
| Weight | 33g |
| Input Voltage | 4.7 V ~ 5.2V |
| Operating Temperature | -10 ℃ ~ +80℃ |