Parameter Name | Parameter Description | Default Value | Supplementary Notes |
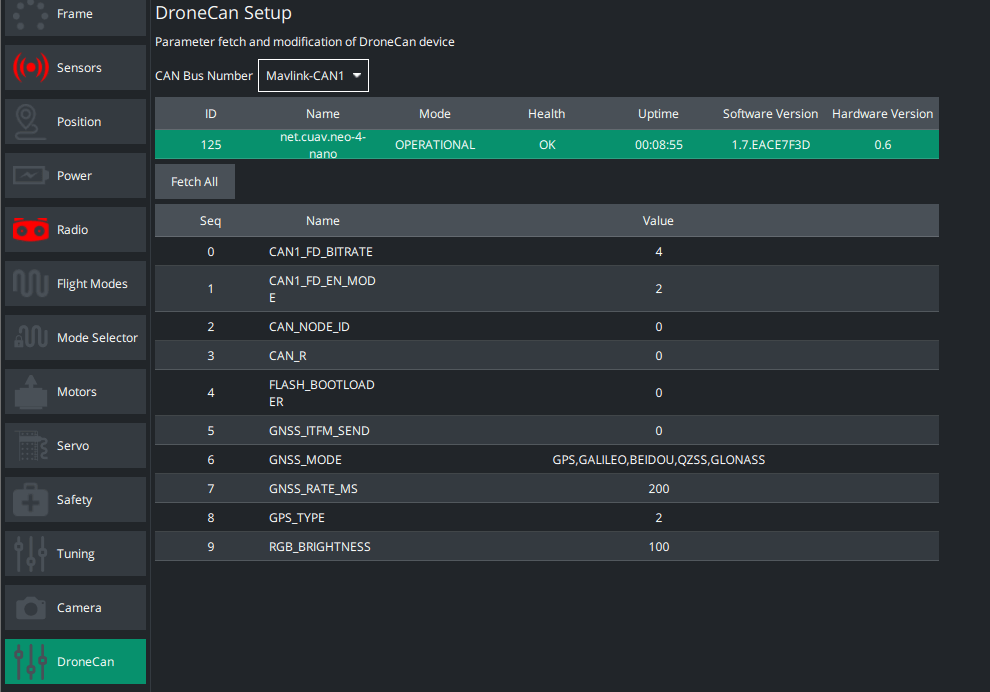
| CAN1_FD_BITRATE | CAN interface FD data bit rate (Mbps) | 4 | Consistent with the default value of ArduPilot |
| CAN1_FD_EN_MODE | Controls the FD enable mode of the CAN interface | 2 (Auto CANFD Mode) | 0 = Disable CANFD; 1 = Force enable CANFD; 2 = Auto enable CANFD when specific conditions are met, and the enabled state remains until power off |
| CAN_NODE_ID | Configures the DroneCAN node ID of the module | 0 | 0 means automatic allocation by the system |
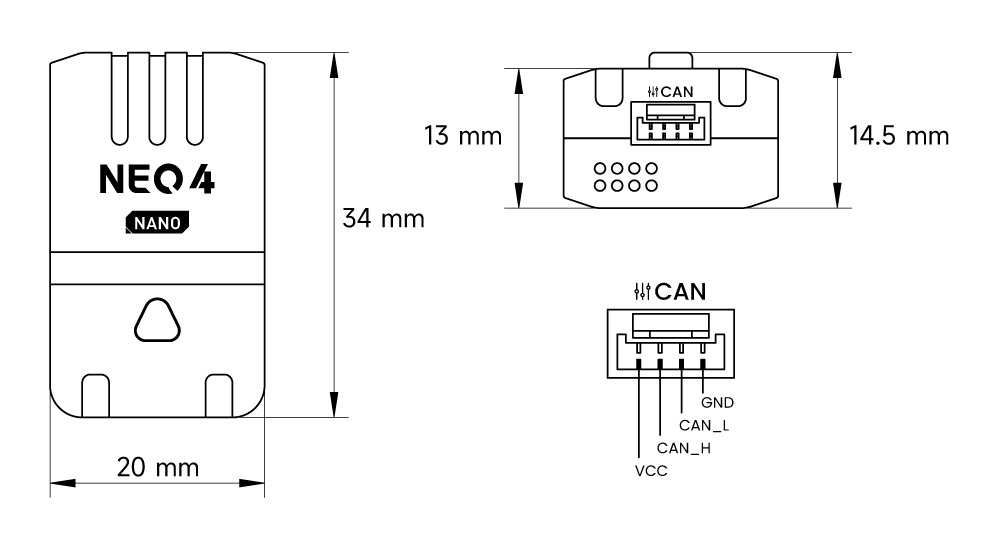
| CAN_R | Enables the CAN terminal resistor or not | False (Disabled) | True = Enable the terminal resistor |
| FLASH_BOOTLOADER | Update Bootloader | 0 | Set to 1 to update the old Bootloader, and the parameter will automatically revert to 0 after the update is completed |
| GNSS_ITFM_SEND | Sends GNSS jamming and spoofing detection data via DroneCAN positioning messages or not | 0 | This data is used by PX4; PX4 cannot arm if the signal jamming status is abnormal |
| GNSS_MODE | Sets the satellite navigation systems to be used (mask format) | 111 | Each bit corresponds to a different satellite system; For MIA-M10C, Beidou B1I cannot be enabled at the same time when GLONASS (BIT6) is enabled; Beidou will use the B1C signal when both BIT6 and BIT3 are set |
| GNSS_RATE_MS | Output cycle of CAN positioning-related messages (ms) | 200 | 5 outputs per second by default |
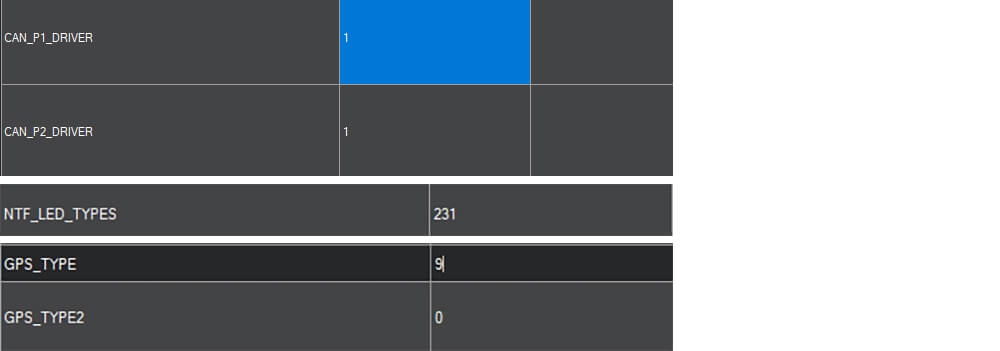
| GPS_TYPE | Compatible with the parameter setting of APM flight controller | 2 | Resolves the issue where the flight controller cannot use DroneCAN positioning messages when APM’s GPS_AUTO_CONFIG is set to 2 |
| RGB_BRIGHTNESS | RGB light brightness adjustment | 100 | 100 means 100% brightness; set to 0 to disable the RGB light |