 Skip to content
Skip to content 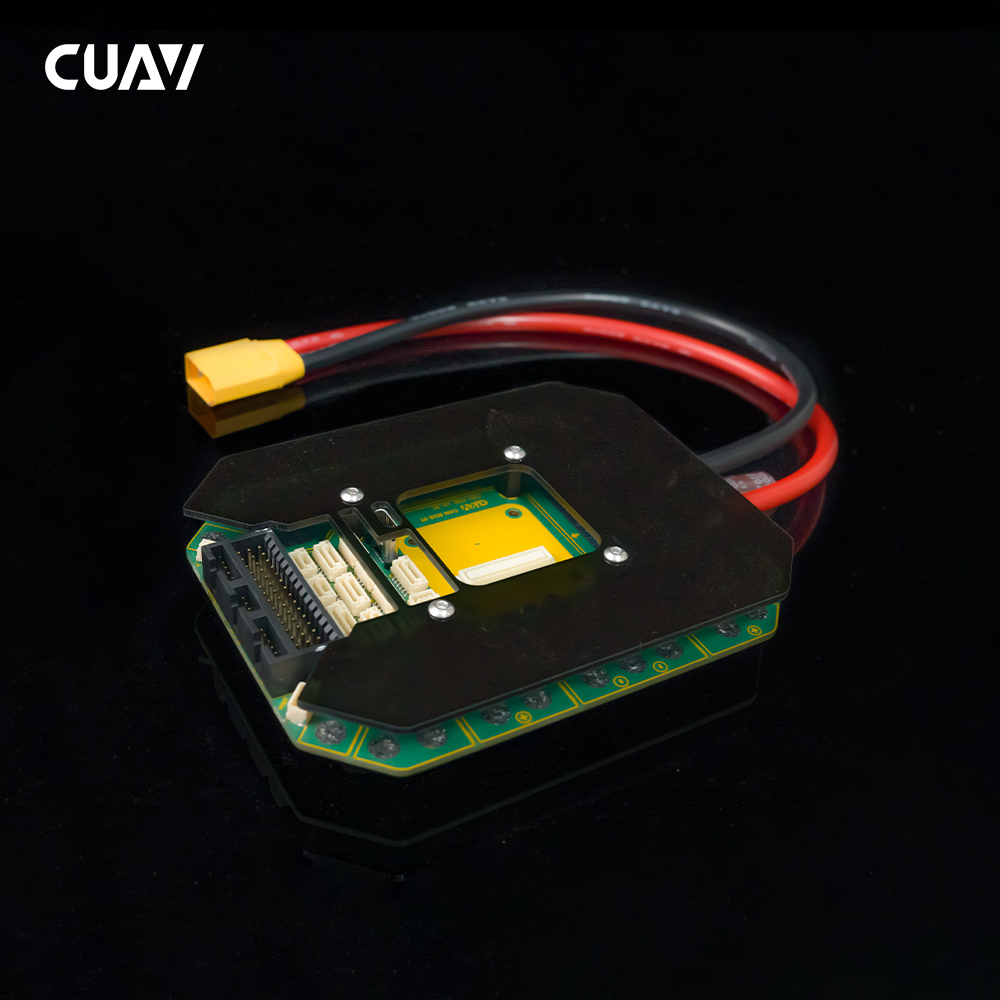










CAN PDB Controller Baseboard Brief:
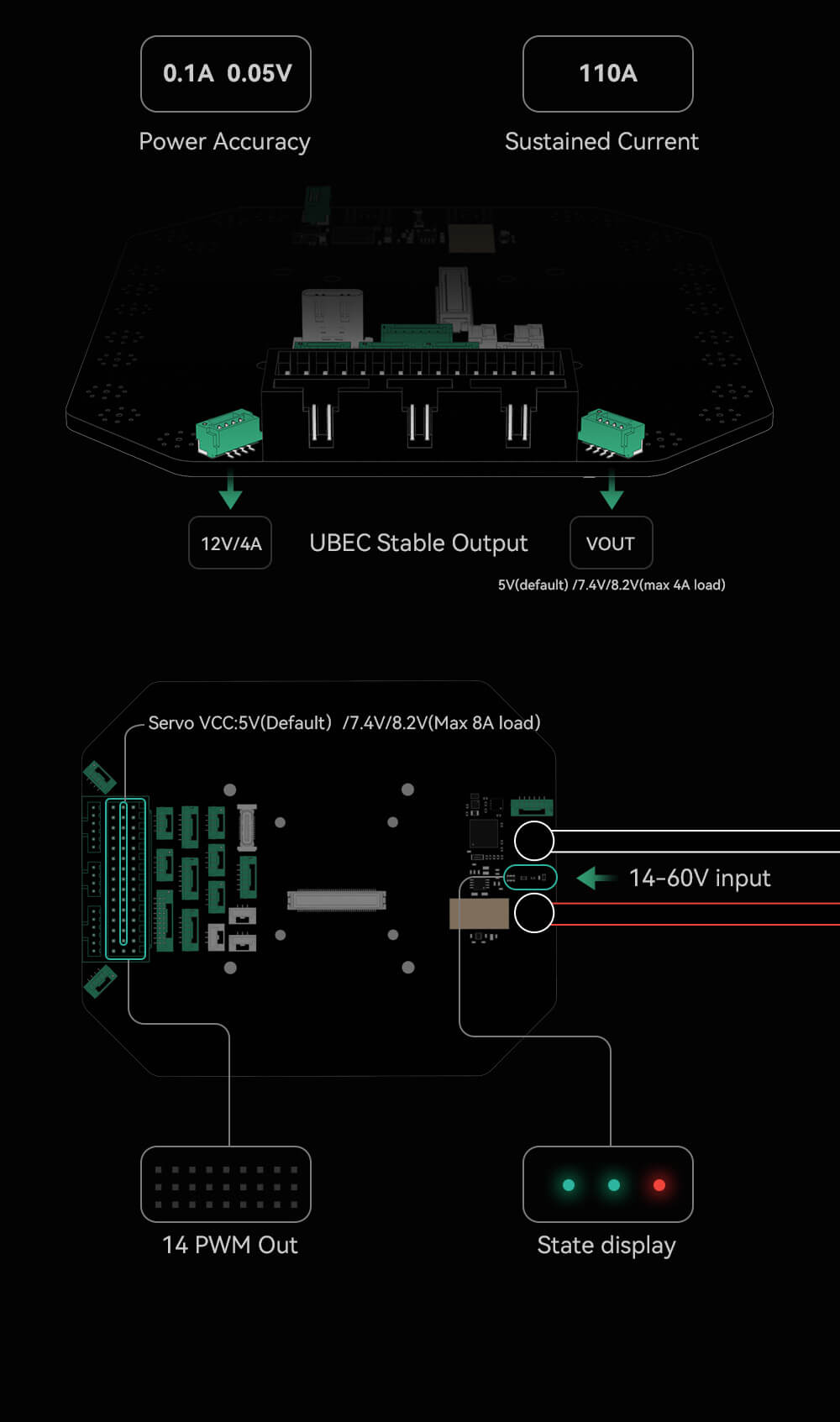
CAN PDB is a multi-functional baseboard of the CORE controller, which provides abundant interfaces, integrates the functions of the power module and power distribution board, supports voltage input of 14~60V, and provides continuous working current up to 110A. It adopts a self-developed ITT algorithm and has high accuracy power detection of 0.1 A and 0.05V. It has 10 power output welding points and provides a 5V/ 6A and a 12V /4A stabilized output to provide power for an external device. Supports the CORE modules of V5+, X7+, and X7+ Pro Controller.
CAN PDB Controller Baseboard Feature:
- Support 14 ~ 60V voltage input, 110 A current
- 0.1 A, 0.05 V power measurement accuracy
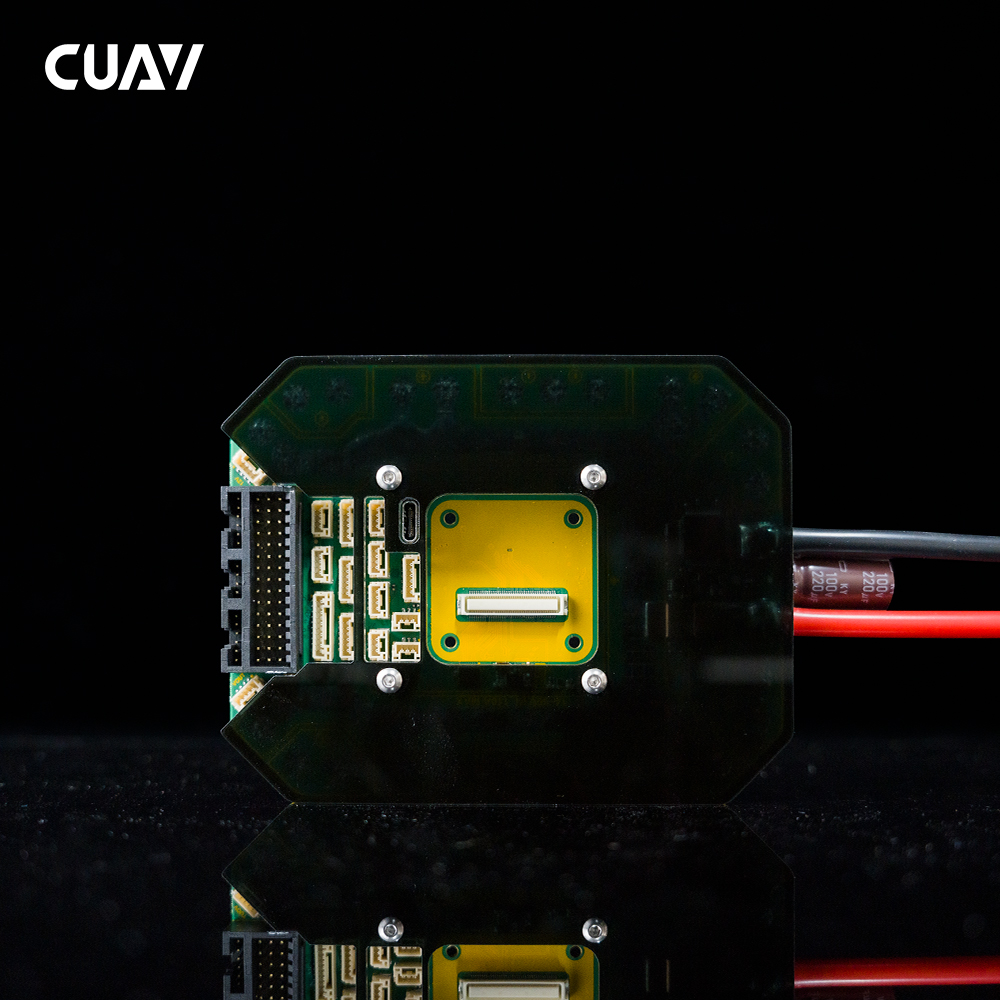
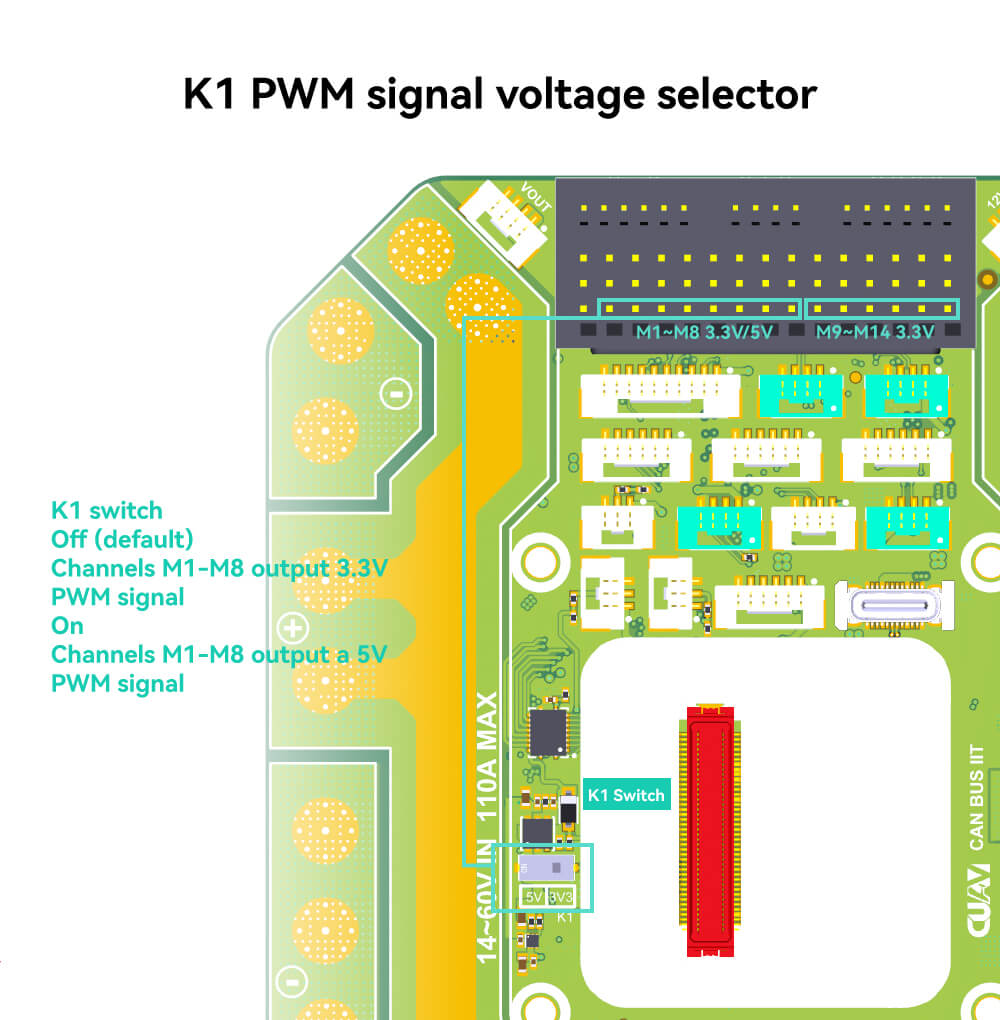
- Rich interfaces and 14 PWM outputs
- 5V/6A and a 12V/4A stabilized output
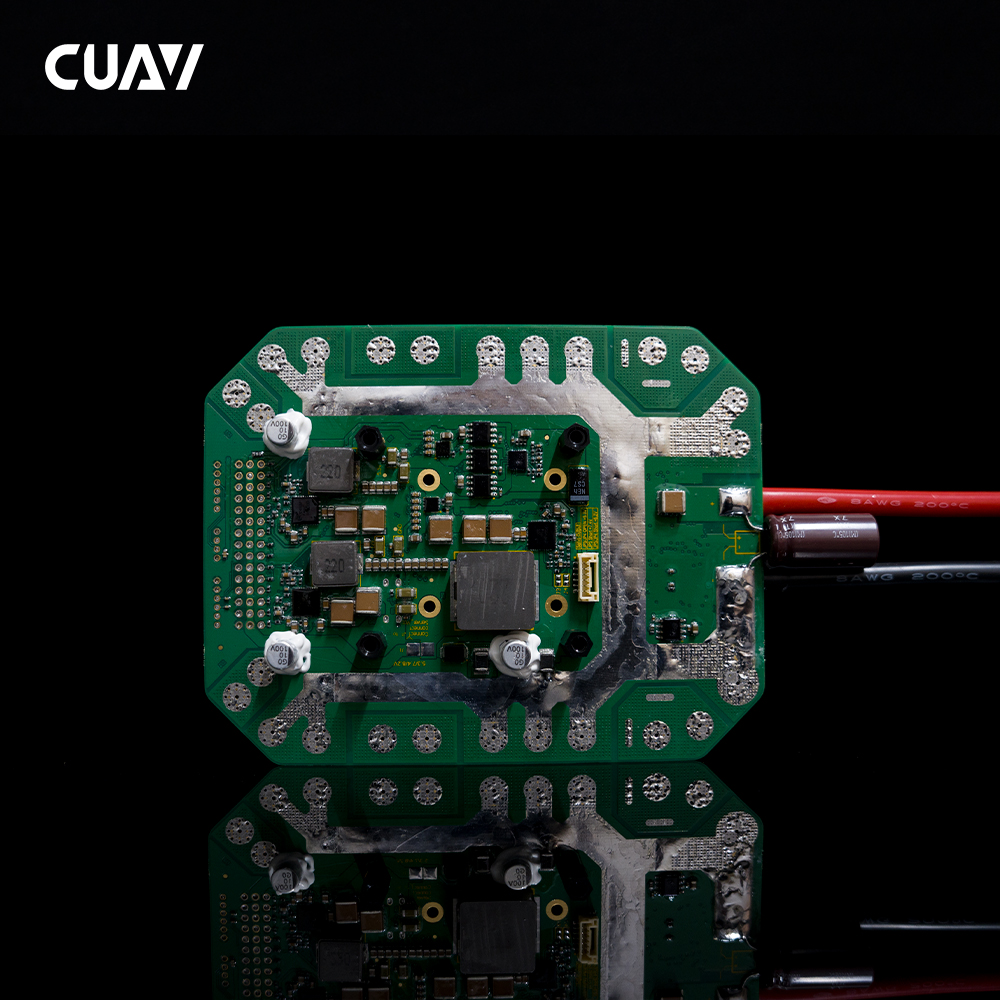
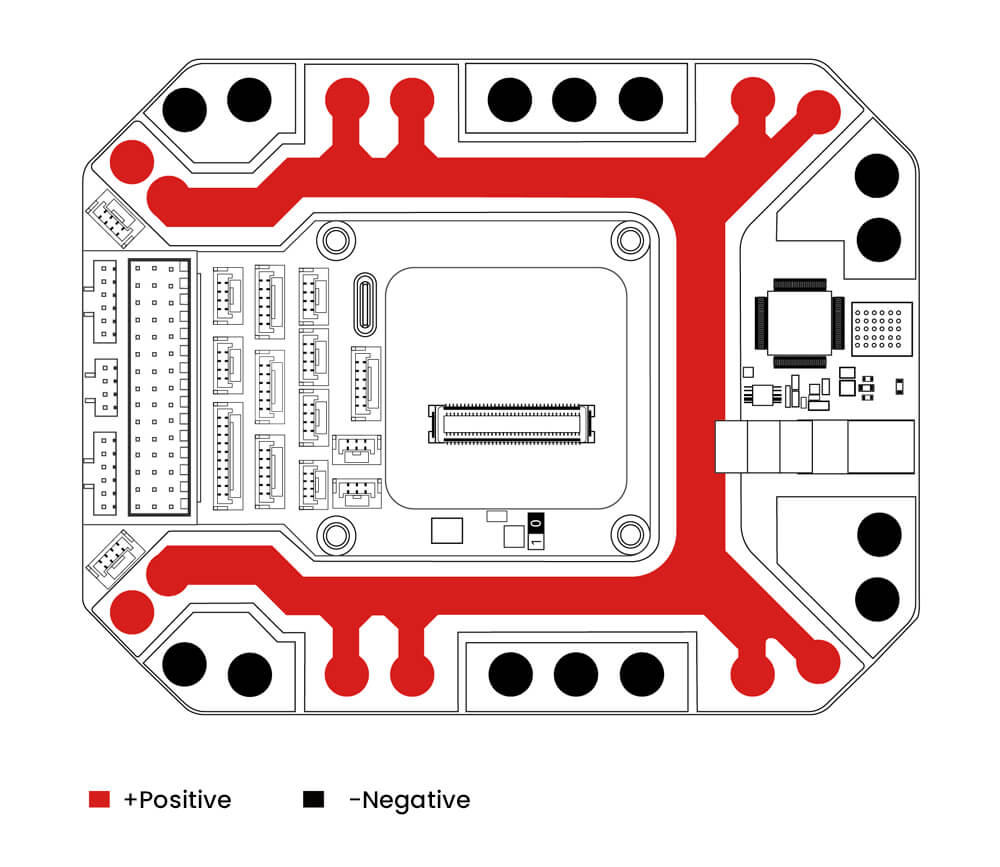
- Thickened tinned PCB to reduce internal resistance
- Power indicator LED visually displays battery voltage status
Main Parameter | |
| MCU | STM32F412(32 Bit Arm® Cortex®-M4, 100MHz, 512KB FLASH, 256KB RAM) |
| Operating Voltage | 14 ~ 62V(4 ~ 15S Lipo) |
| Detection Current Range | 0 ~ 110A |
| Output Power(MAX) | 6000W(last 120s) |
| Stable Output Power(MAX) | 5500W |
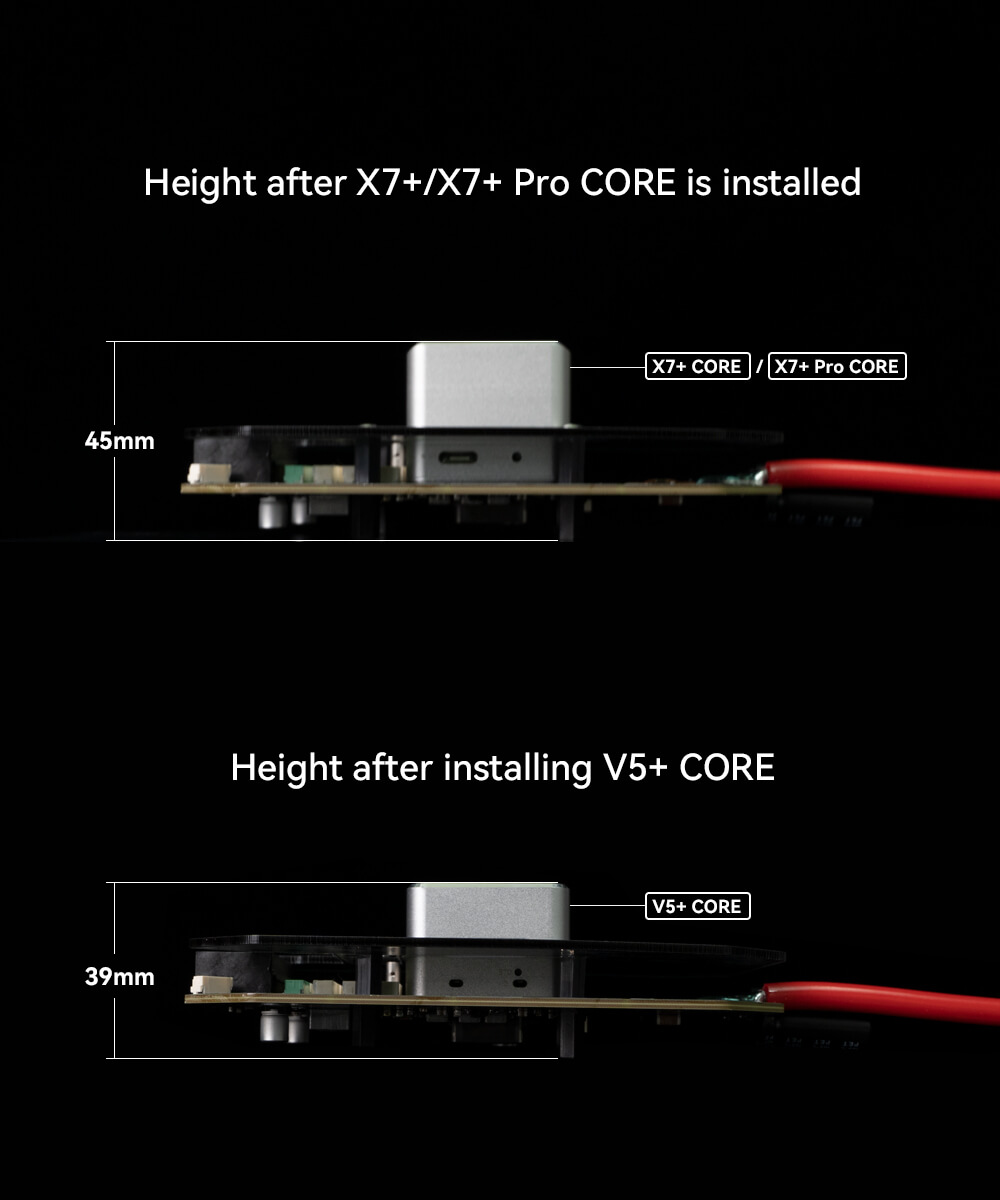
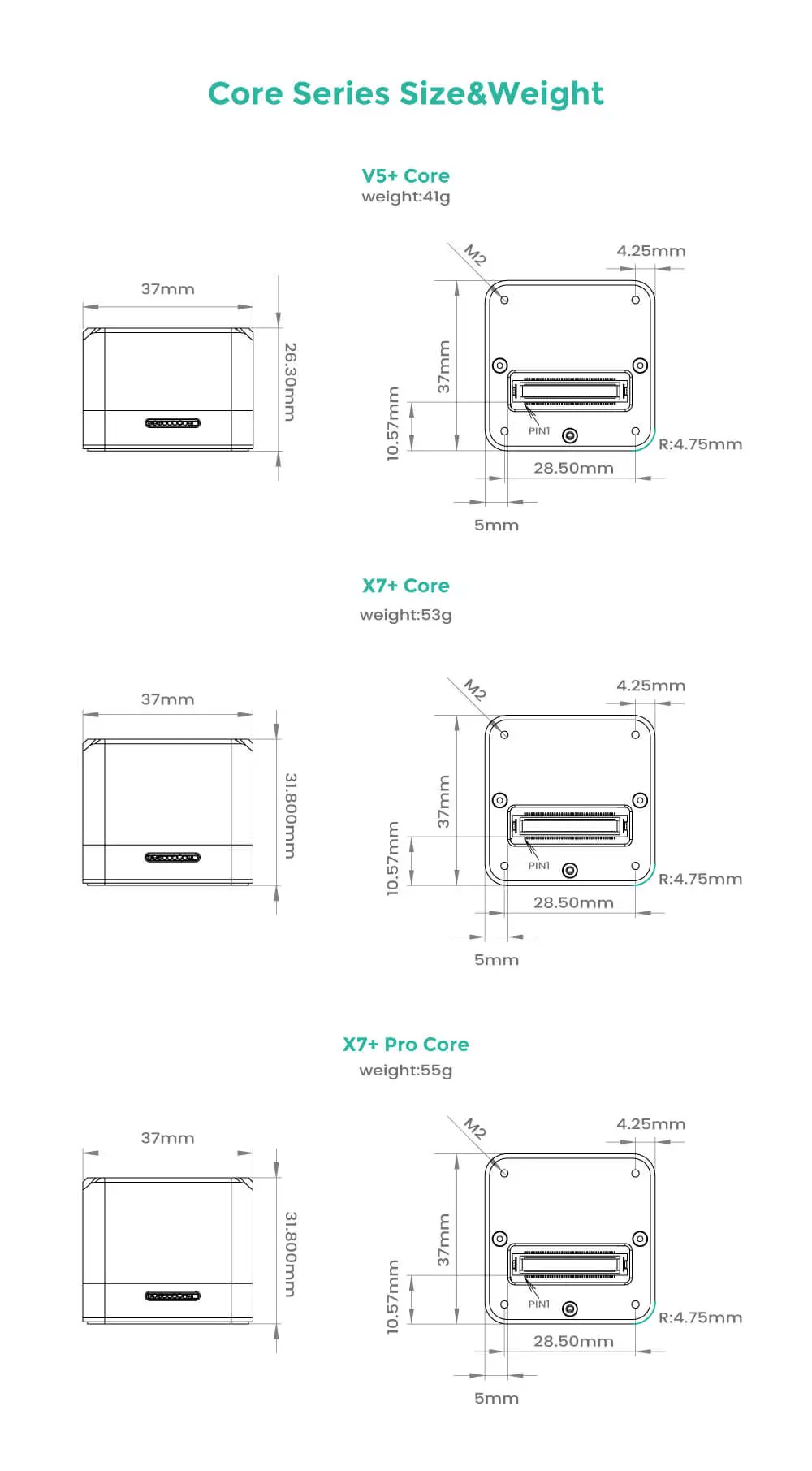
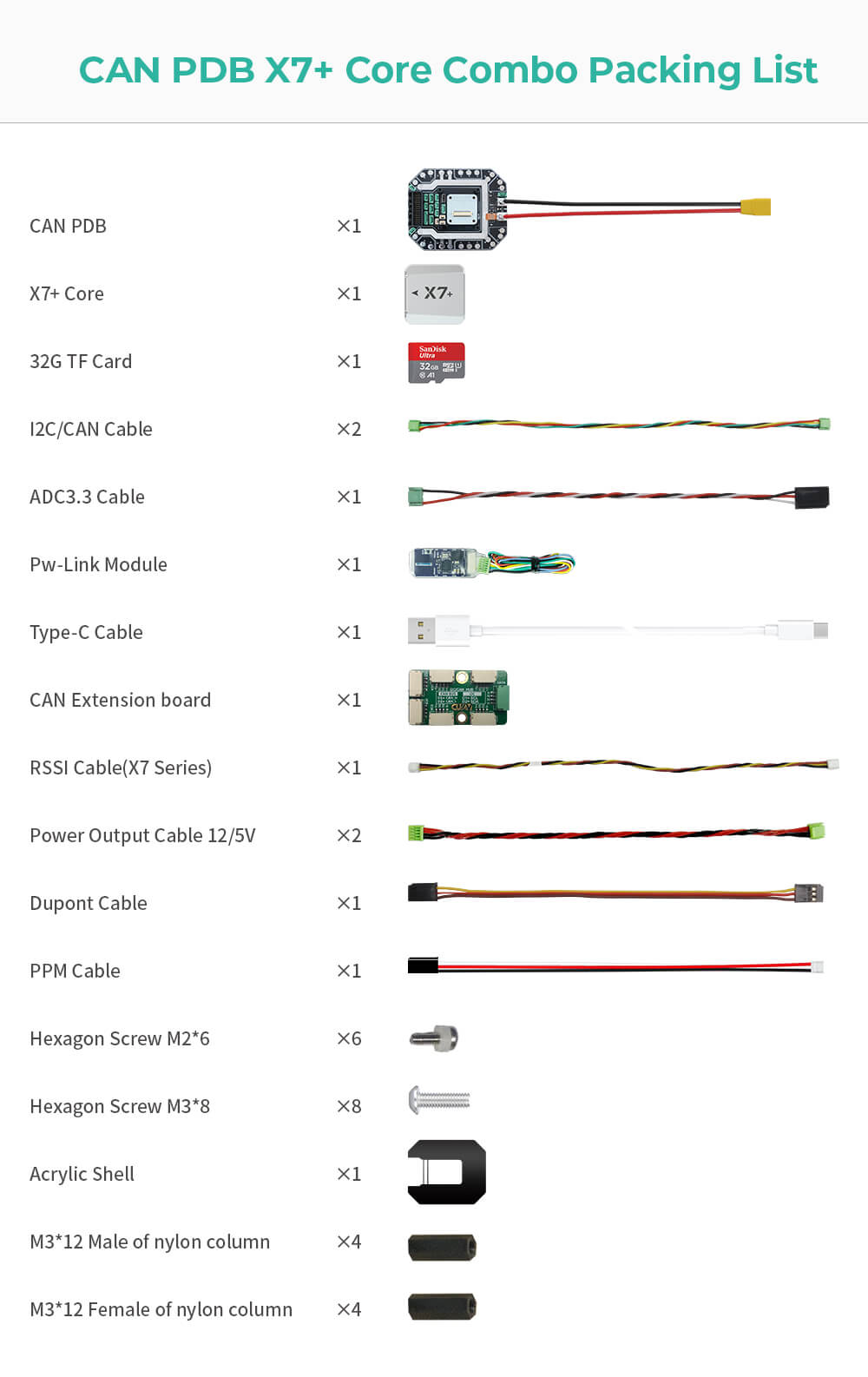
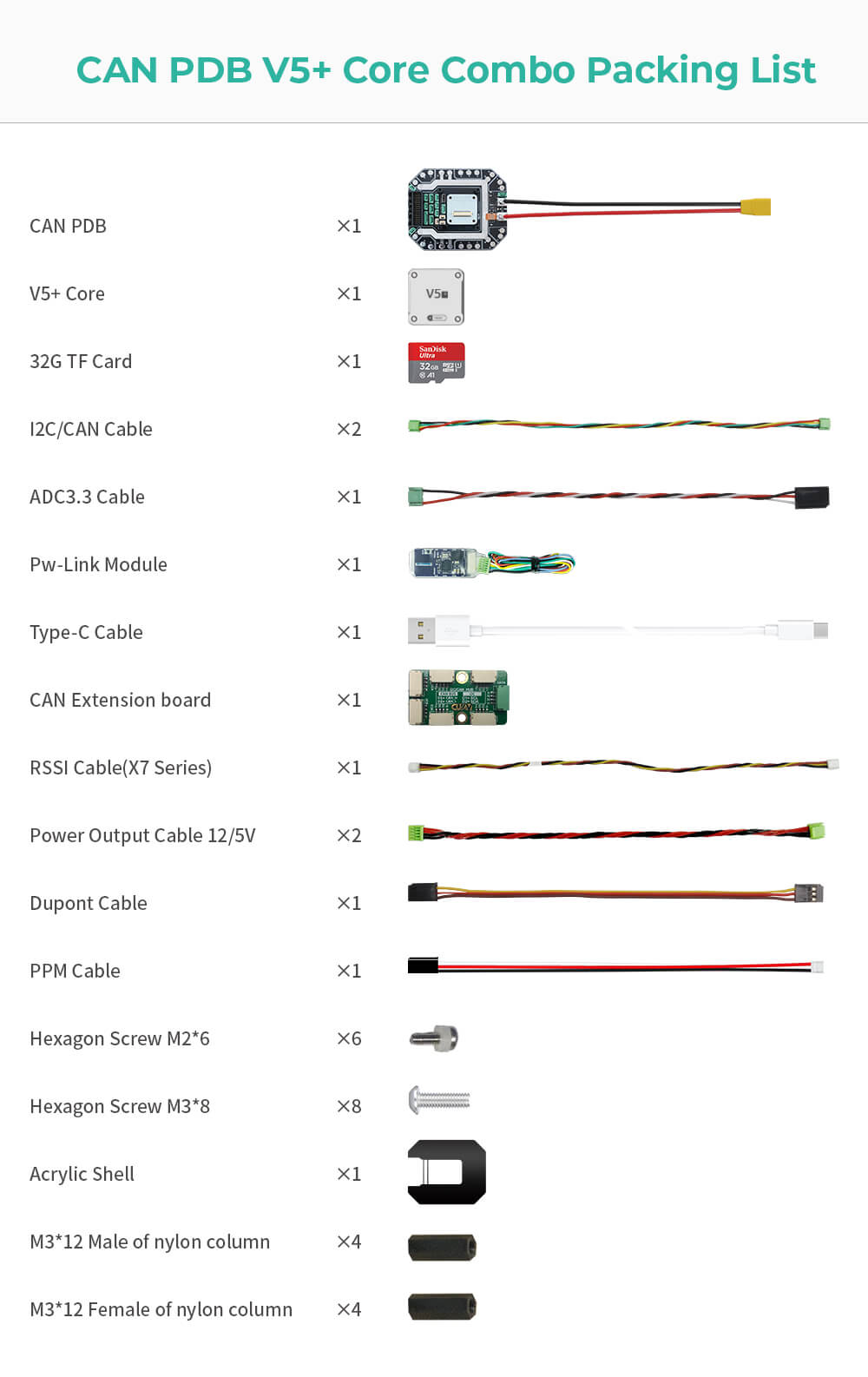
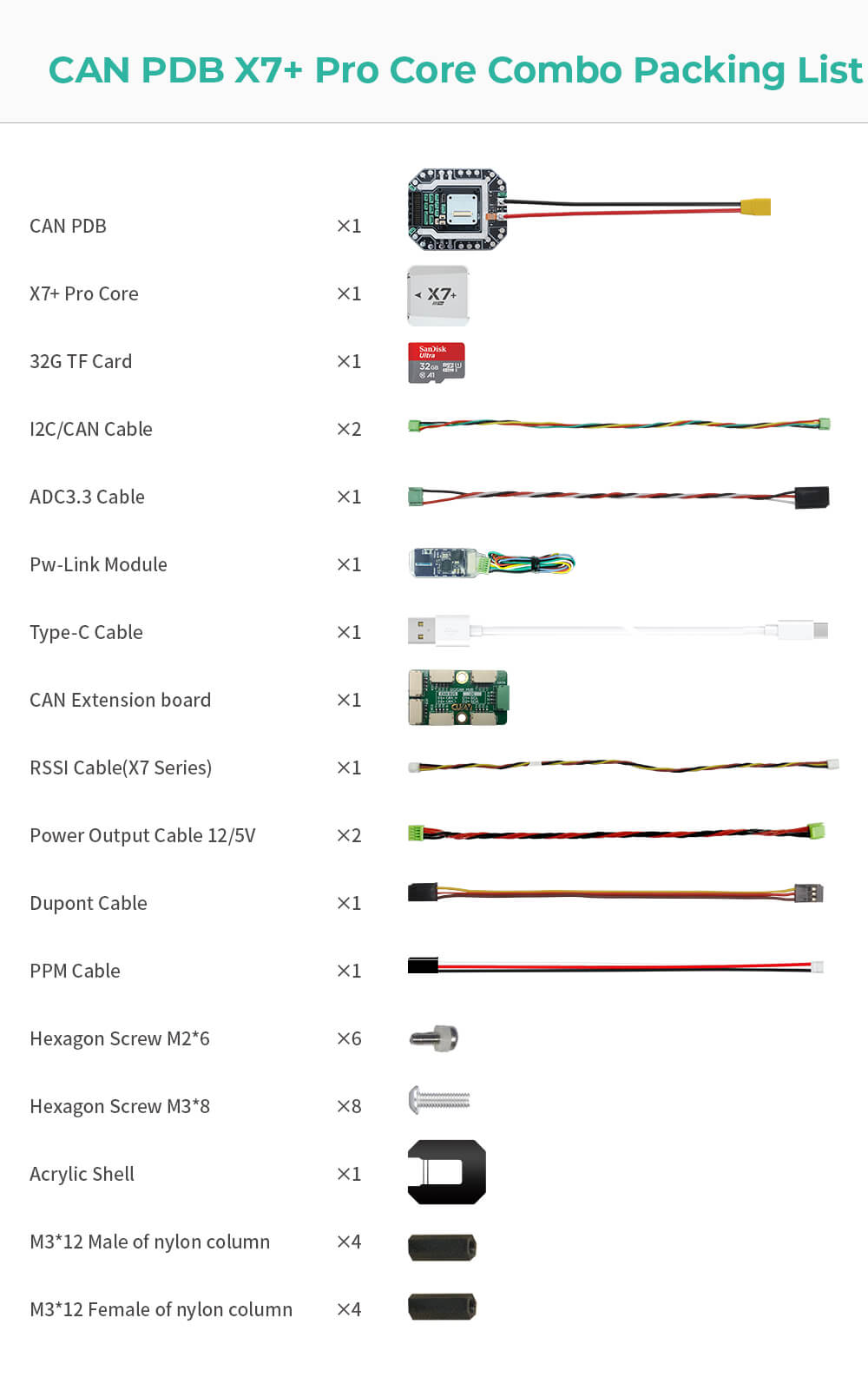
| Core | V5+ / X7+ / X7+ Pro CORE |
| Frame Type | Plane/VTOL/Copter/Heli/Rover/Sub |
| Controller Firmware | ArduPilot 4.0.0 and above firmware PX4 1.11.0 and above firmware |
| Operating Temperature | -20 ~ 100℃ |
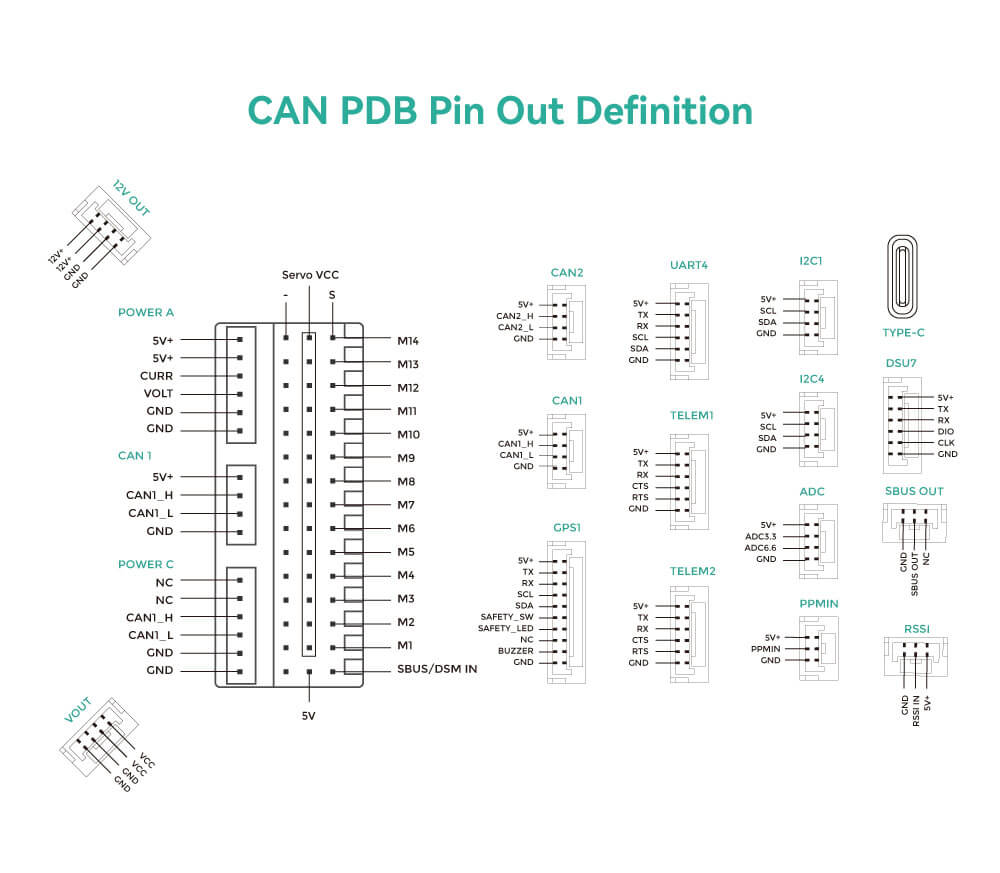
Interface | |
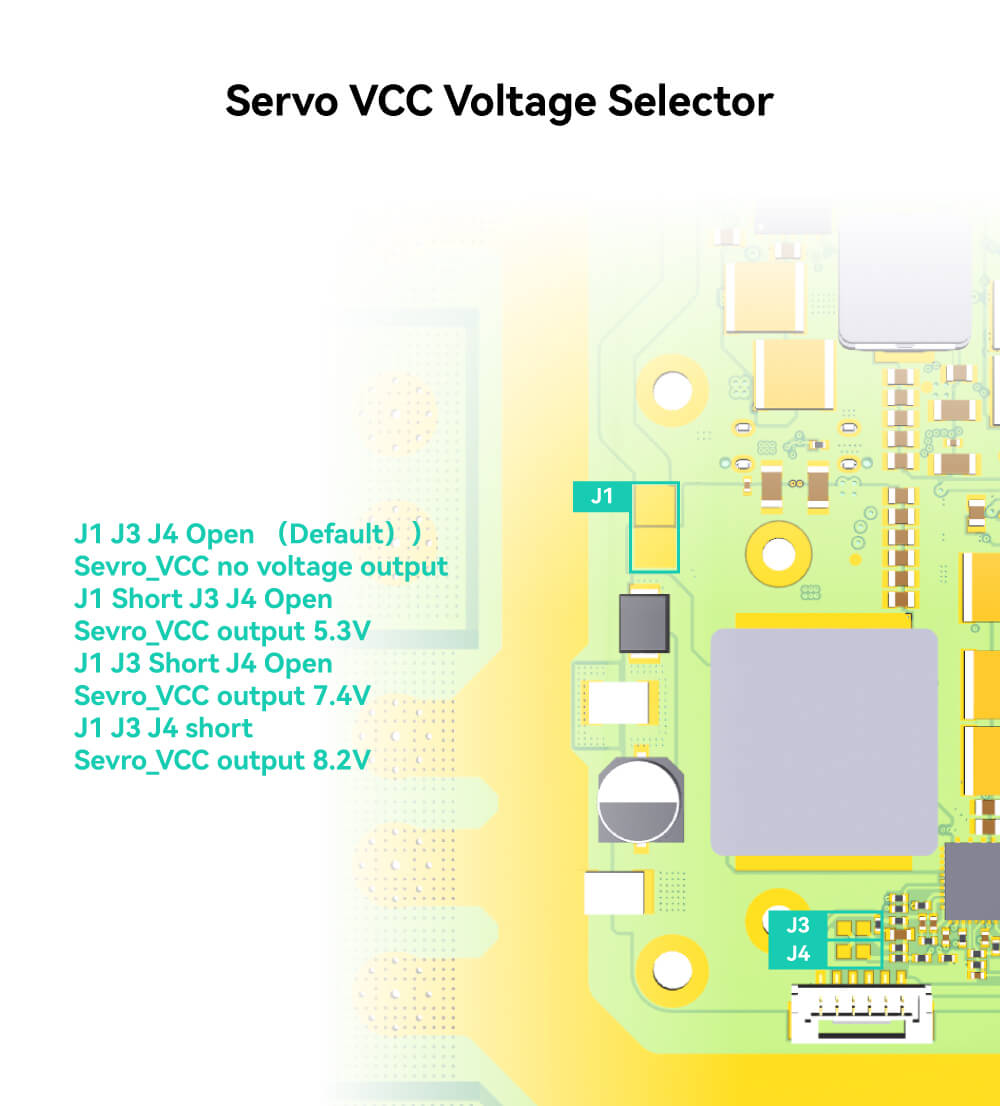
| V_OUT | 5V(default)/7.4V/8.2V(4A) |
| Servo VCC | 5V(default)/7.4V/8.2V(8A) |
| 12V OUT | 4A(max) |
| USB | 1 |
| UART1 | 5(GPS/UART4/TELEM1/TELEM2/DEBUG) |
| CAN | 2 |
| I2C | 3 |
| SBUS/DSM IN | 1 |
| PPM IN | 1 |
| Servo | 14 |
| ADC3.3 | 1 |
| ADC6.6 | 1 |
| SBUS Outs | 1(This interface is invalid when using X7+/X7+pro core) |
| RSSI | 3.3V(Analog input) |
| DSU7 | 1 |
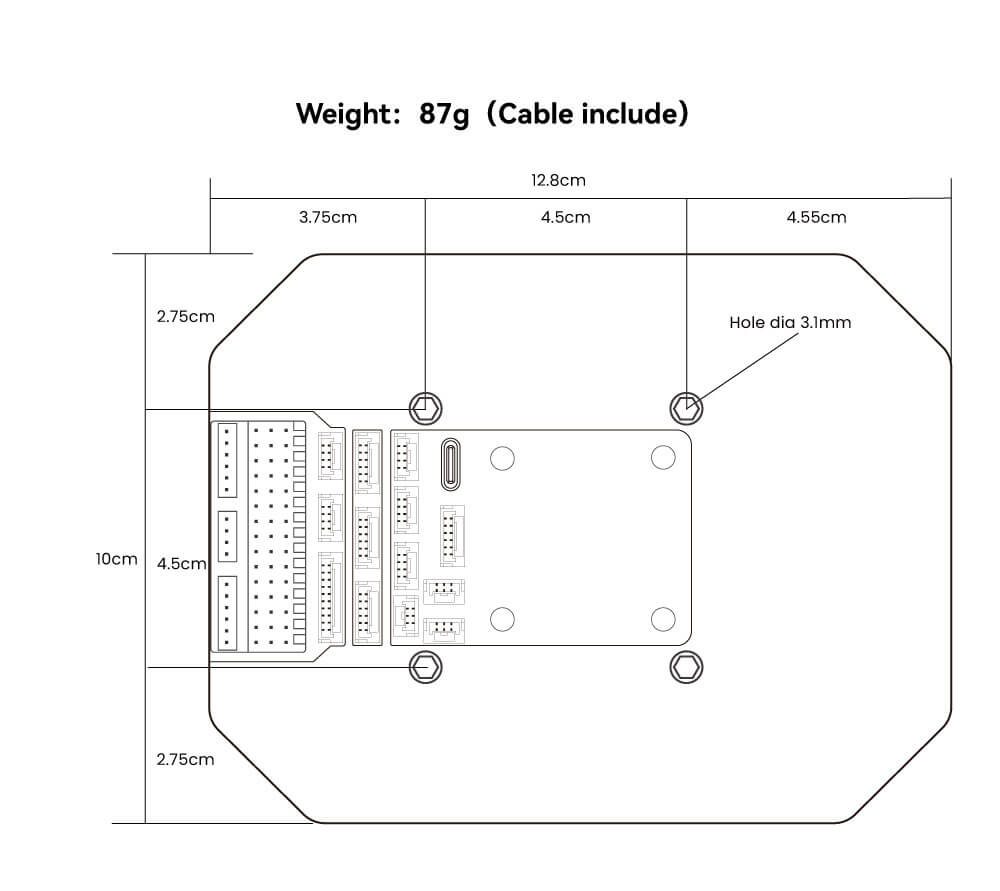
| Size | 12.8cm (length) * 10.0cm (width) *1.2cm (height) |
| Weight | 200g (including cable) |
| Wire Length | 30cm |
CAN PDB Controller Baseboard Brief:



Purchase Channels

Brochure Downloads

Technical documentation

Product Usage Scope and Limitations
Platform Compliance and End-User Commitment Statement
To jointly comply with international trade regulations and Chinese law, as a user purchasing products on this platform, you must understand and agree to abide by the following provisions:

Purchase and Use commitment
You commit that all products purchased through this platform will be used for legal and compliant civilian purposes. You shall not use the products for any military purposes, prohibited scenarios, or any activities related to weapons or weapons of mass destruction.

Export and Resale Restrictions
1. Do not directly or indirectly export or transship products to any country/region subject to sanctions under Chinese law or international regulations.
2. Do not provide products to any entity or individual included in the restricted lists by international or domestic regulatory authorities.
3. If you resell products to downstream customers, you are obligated to ensure that they make compliance commitments consistent with the core terms of this statement.

Liability and Consequences of Breach
You fully understand that if you breach the aforementioned commitments(including false information, illegal use, illegal export, etc.), which results in any investigation, penalty, or loss (including financial compensation, damage to goodwill, etc.) to this platform, you shall bear full compensation liability.
Meanwhile, the platform reserves the right to immediately suspend or terminate the provision of services to you and pursue your liability for breach of contract in accordance with the law.
The validity of this statement is independent and shall not become invalid by the completion of any transaction between you and the platform.




