 Skip to content
Skip to content 









Please Contact Customer Service for Stock Availability!
CUAV V5 Nano Controller Brief:
V5 nano is designed by the CUAV and PX4 teams for businesses or enthusiasts who are extremely sensitive to space but want to get the power of V5. Its design is based on the Pixhawk FMU v5 standard and is perfectly compatible with PX4 and ArduPilot firmware.
CUAV V5 Nano Controller Feature:
- FMU v5 hardware standard design
- Compatible with ArduPilot and PX4 firmware
- Complete functions and compact size
- Aviation aluminum alloy shell
CUAV V5 Nano Controller Specification:
Main Parameter | |
| Processor | STM32F765(32 Bit Arm Cortex -M7, 216MHz, 2MB FLASH, 512KB RAM) |
Sensors | |
| Accelerometer | ICM-20602 / ICM-20689 / BMI055 |
| Gyroscope | ICM-20602 / ICM-20689 / BMI055 |
| Compass | IST8310 |
| Barometer | MS5611 |
Interfaces | |
| UART | 5 |
| I2C | 4 |
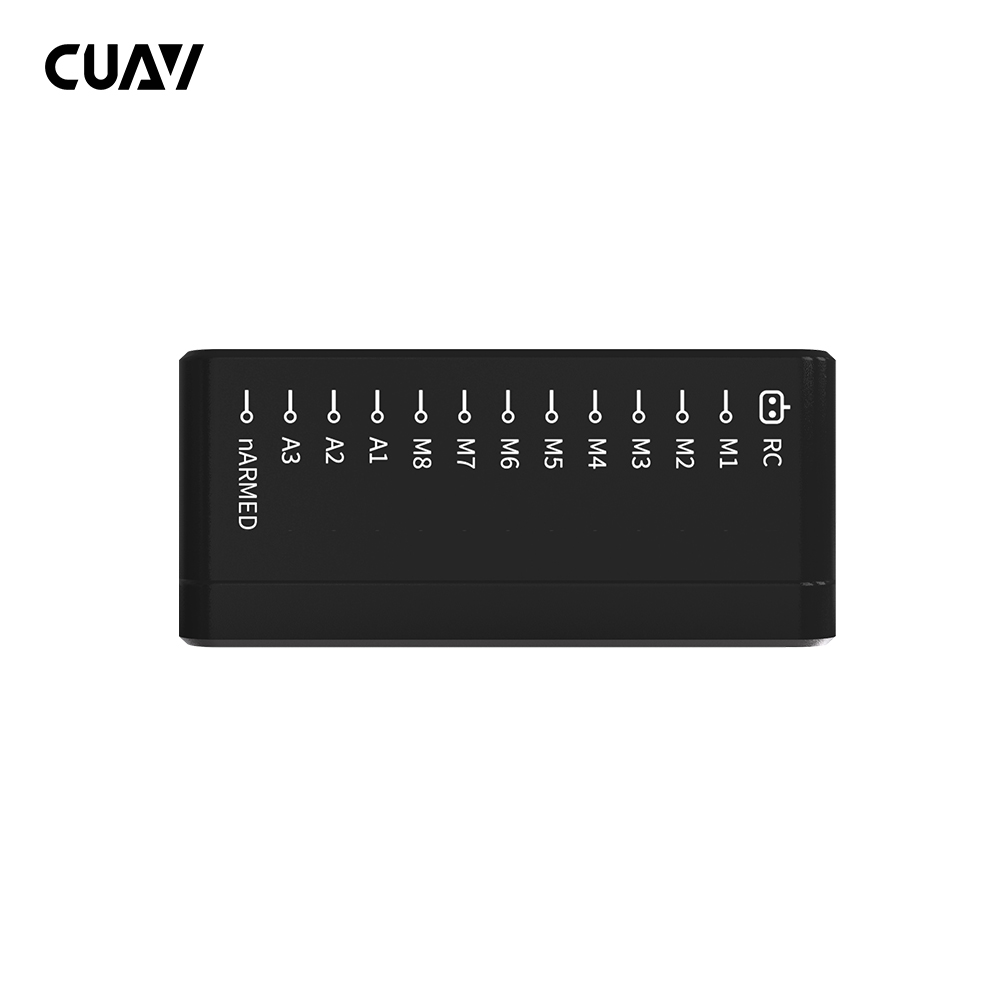
| PWM | Up to 11 PWM outputs(8 standard pwm output +3 optional pwm output )* |
| nARMED* | 1 |
| Enter the Protocol | PPM/SBUS/DSM, etc. |
| RC IN | 1 |
| PPM IN | 1 |
| RSSI | PWM or 3.3 analog voltage |
| CAN | 2 |
| Current and Voltage Input | 1 |
| Safety Switch | 1 |
| GPS | 1 |
| DEBUG | 1 |
| JATG | 1 |
| USB | 1 (Type-C) |
| Rated Voltage | 4.5 ~ 5.5 V |
| USB Voltage | 5V ± 0.25 V |
| Servo Voltage | 0 ~ 36 V |
| Operating Temperature | -40 ~ 85 ℃ |
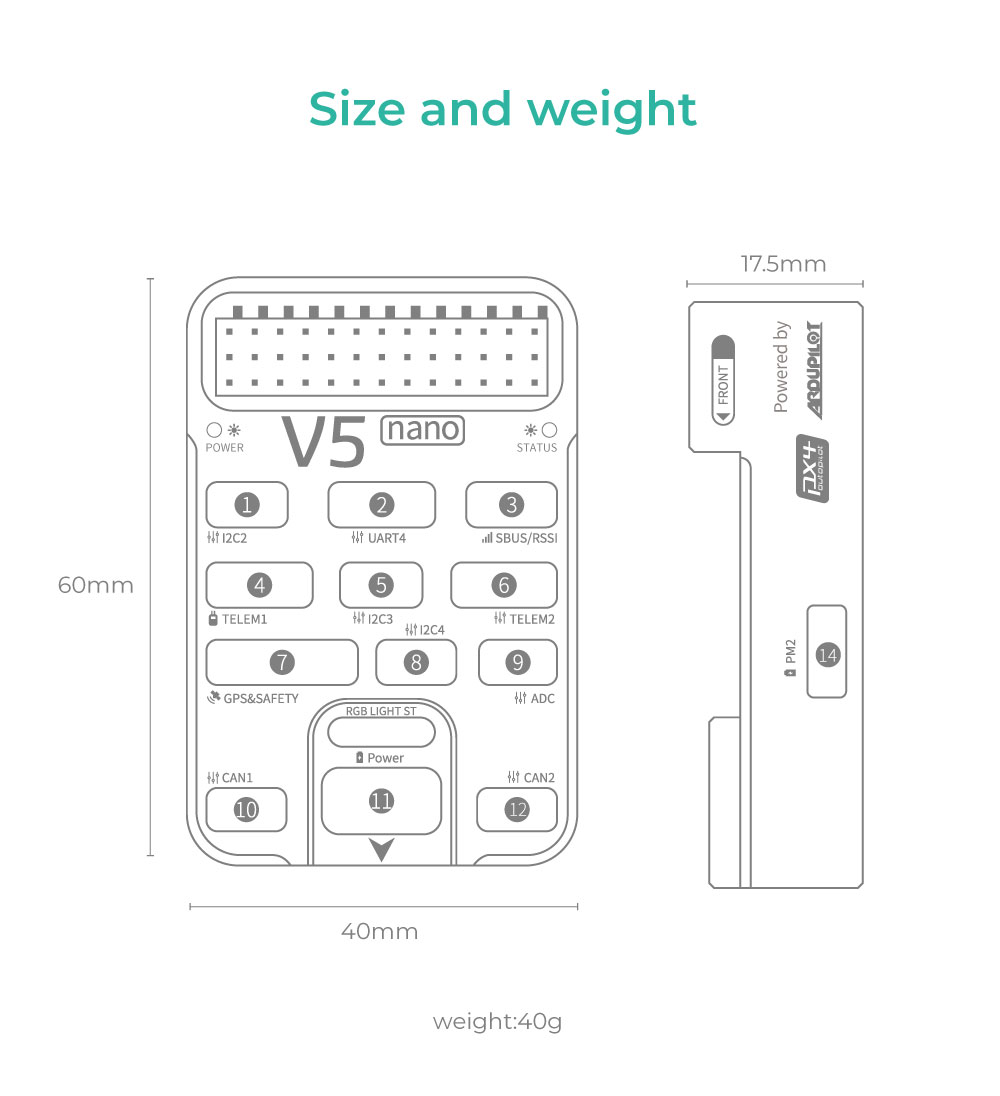
| Size | 60 × 40 × 14mm |
| Weight | 50g |
CUAV V5 Nano Controller Description:

Performance is still strong
V5 nano in design than the fuselage V5 compared Controller, while smaller, but the performance is not discounted, equipped with a high-performance STM32F765 processing chip, at the same time with four groups of all interfaces segregation protection chip, effectively prevent electrostatic breakdown and 10-level breakdown master incompatible problem

Custom 2.6 mm spacing forease of installation
The 10-pin spacing on V5 nano is designed to solve user experience issues during installation, where connectors get crowded. This will ensure a more rigid cable connection.

Built-in multi-sensor redundancy
The 10-pin spacing on V5 nano is designed to solve user experience issues during installation, where connectors get crowded. This will ensure a more rigid cable connection.



Platform Compliance and End-User Commitment Statement
To jointly comply with international trade regulations and Chinese law, as a user purchasing products on this platform, you must understand and agree to abide by the following provisions:

Purchase and Use commitment
You commit that all products purchased through this platform will be used for legal and compliant civilian purposes. You shall not use the products for any military purposes, prohibited scenarios, or any activities related to weapons or weapons of mass destruction.

Export and Resale Restrictions
1. Do not directly or indirectly export or transship products to any country/region subject to sanctions under Chinese law or international regulations.
2. Do not provide products to any entity or individual included in the restricted lists by international or domestic regulatory authorities.
3. If you resell products to downstream customers, you are obligated to ensure that they make compliance commitments consistent with the core terms of this statement.

Liability and Consequences of Breach
You fully understand that if you breach the aforementioned commitments(including false information, illegal use, illegal export, etc.), which results in any investigation, penalty, or loss (including financial compensation, damage to goodwill, etc.) to this platform, you shall bear full compensation liability.
Meanwhile, the platform reserves the right to immediately suspend or terminate the provision of services to you and pursue your liability for breach of contract in accordance with the law.
The validity of this statement is independent and shall not become invalid by the completion of any transaction between you and the platform.




