 Skip to content
Skip to content About Nora Series Intelligent Controllers
Nora+® is an advanced Controller independently designed by CUAV®. It uses a higher-performance STM32H7 processor and integrates industrial-grade sensors. Compared to the previous flight controller, it has better performance and greater reliability. This board can run ArduPilot firmware with PX4 firmware. Nora+ is ideal for academic research and commercial systems integration.

Tip
Nora+ Controller is a derivative version of Nora. From January 1, 2022, Nora+ will replace Nora; Nora+ is perfectly compatible with ArduPilot 4.10/PX4 V1.12.3 and higher firmware.Nora+ supports monitoring Servo port voltage, the maximum input voltage of Servo port is 10V; other parts have no difference.
Other characteristics
- Internal shock absorption
- Ports on the side
- Support more dshot output
- Support IMU heating, make the sensor work better
- Dedicated UAVCAN battery port
- 3 sets of IMU sensors
- High-performance ICM-42688-P sensor
Quick Summary
- Main FMU Processor: STM32H743/STM32H753
-
On-board sensors:
- Accelerometer/Gyroscope: ICM42688-P(Nora:ICM-20689)
- Accelerometer/Gyroscope: ICM20689(Nora:ICM-20649)
- Accelerometer/Gyroscope: ICM20689(Nora:BMI088)
- Magnetometer: RM3100
- Barometer: MS5611*2
-
Interfaces:
- 14 PWM outputs (12 support Dshot)
- Support multiple RC inputs (SBUs/CPPM/DSM)
- SBUS Output
- Analogue / PWM RSSI input
- 2 GPS ports(GPS and UART4 ports)
- 4 i2c buses(4 independent i2c interfaces, 2 integrated in GPS and UART4 interface)
- 2 CAN bus ports
- 2 Power ports(Power A is common adc interface, Power C is uavcan battery interface)
- 2 ADC input
- 2 USB ports (Type C and gh 1.25)
- Power System:
- Power: 4.5~5.4V
- USB Input: 4.75~5.25V
- Servo Rail Input: 0~10V
- Weight and Dimensions:
- Weight: 50g
- Size: 46*64*22mm
- Other Characteristics:
- Operating temperature: -20 ~ 85°c
- Three imus
- Supports temperature compensation
- Internal shock absorption
- integrated design
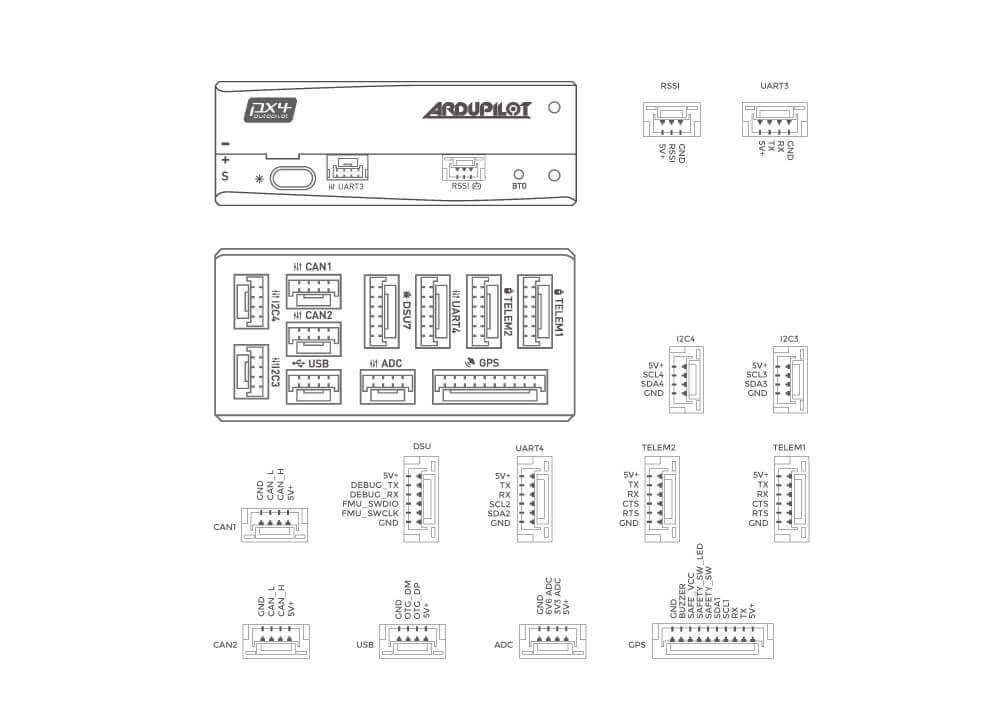
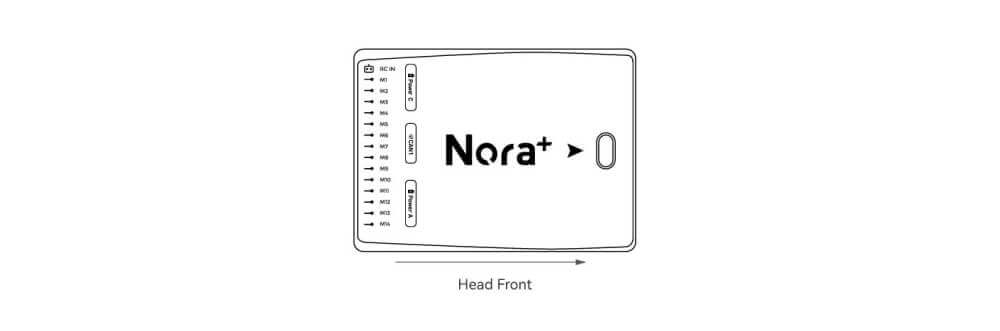
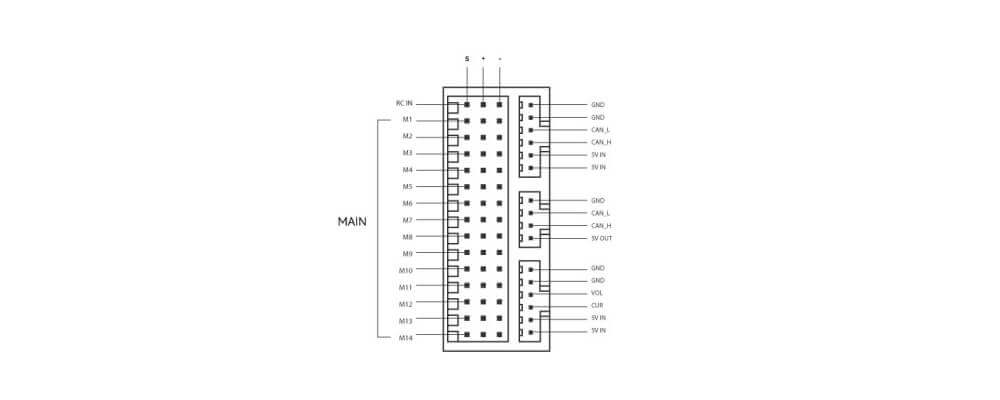
Pinouts
Warning
The RCIN port is limited to powering the rc receiver and cannot be connected to any power/load.
Voltage Ratings
- Nora AutoPilot can be triple-redundant on the power supply if three power sources are supplied. The two power rails are: Power A, Power C, and *USB.
Note
The output power rails PWM OUT (0V to 10V) do not power the controller board (and are not powered by it). You must supply power to one of Power A, Power C or USB or the board will be unpowered.
Normal Operation Maximum Ratings
Under these conditions, all power sources will be used in this order to power the system:
-
- Power A and Power C inputs (4.5V to 5.4V)
- USB input (4.75V to 5.25V)
Building ArduPilot Firmware
./waf configure --board CUAV-Nora
./waf copter --upload
Debug Port
The system’s serial console and SWD interface operate on the DSU7 port. Connect the FTDI cable to the DSU7 connector (the product list contains the CUAV FTDI cable).
Peripherals
- Digital Airspeed Sensor
- Telemetry Radio
- Rangefinders/Distance sensors
- others
Peripherals
- Digital Airspeed Sensor
- Telemetry Radio
- Rangefinders/Distance sensors
- others
Nora/Nora+ Wiring Quick Start
This quick start guide shows how to power the Nora+ flight controller and connect its most important peripherals.
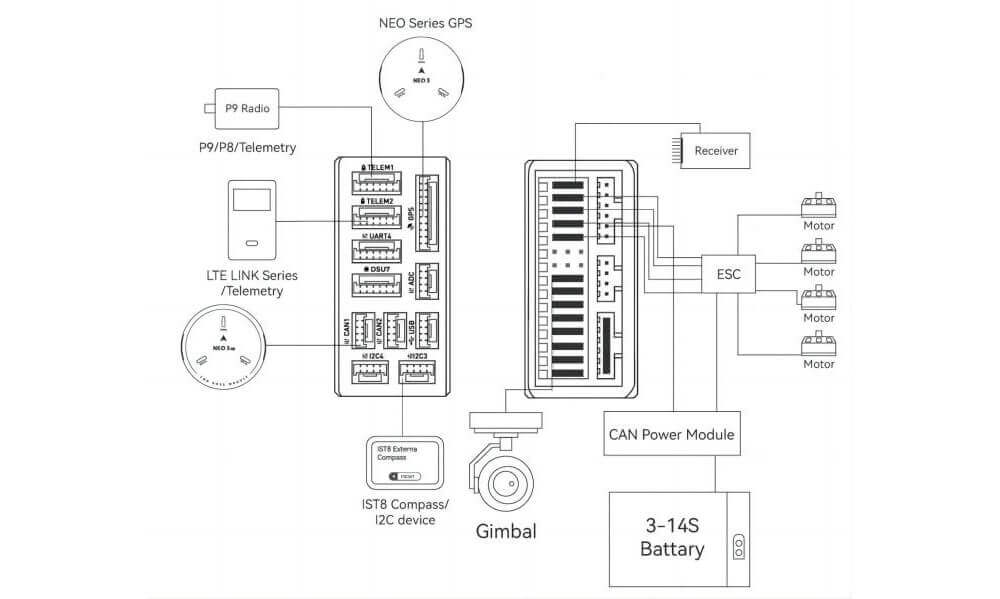
Wiring Chart Overview
The image below shows how to connect the most important sensors and peripherals (except the motor and servo outputs). We’ll go through each of these in detail in the following sections.
Tip
This chapter applies to Nora and Nora+ controllers.
Main interface | Function |
|---|---|
| POWER A | Connect the power module. Power input with analog voltage and current detection. Do not use a Digital PM on this connector! |
| POWER C | Please connect CAN PMU SE to this interface; this interface is connected to the Dronecan power module. |
| GPS&SAFETY | Connect Neo series GPS or C-RTK 9P, including GPS, safety switch, buzzer interface. |
| UART 4 | Can be used to connect to GPS, can be used as a second GPS |
| TELEM1/TELME2 | Connect to the Telemetry System |
| TF CARD | SD card for log storage (card pre-inserted in factory). |
| M1~M14 | PWM signal output port, which can be used to control motors or steering gears; and M1~M12 also support DShot protocol |
| DSU7 | Used for FMU chip debugging, read the DEBUG device information |
| TYPE-C(USB) | Connect to a computer for communication between the controller and the computer, such as loading firmware. |
| I2C1/I2C2/i2C4 | Connect an I2C device, such as an external compass. |
| CAN1/CAN2 | Connect Dronecan devices, such as CAN GPS. |
| RC IN | Including DSM, SBUS, RSSI signal input interface, DSM interface can be connected to DSM satellite receiver, SBUS interface to connect SBUS remote control receiver |
| RSSI | RSSI for the signal strength return module |
Vehicle Front
Tip
If the controller cannot be mounted in the recommended/default orientation (e.g. due to space constraints) you will need to configure the autopilot software with the orientation that you actually used: Flight Controller Orientation.(for PX4 firmware, for Ardupilot firmware).
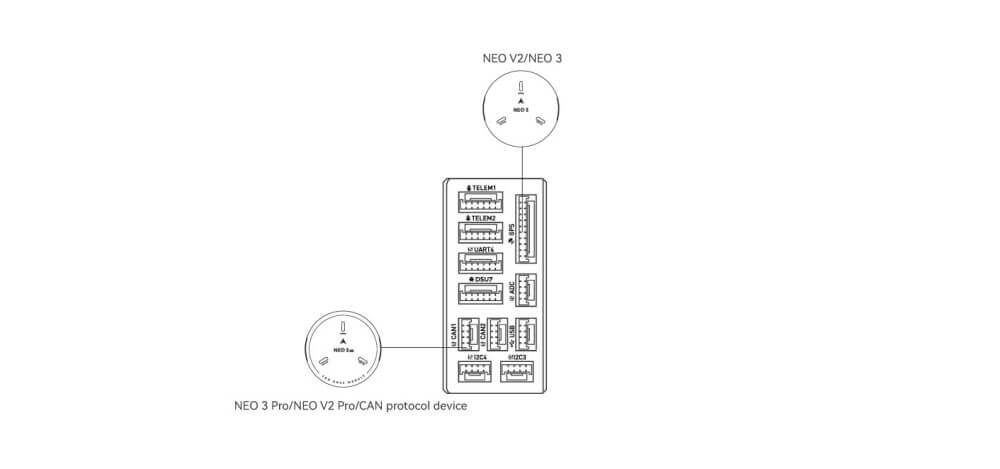
GPS
We recommend that you use Dronecan GPS/RTK (such as Neo 3 pro); you only need to connect it to the CAN 1/2 interface; you can also use an ordinary GPS/RTK module; connect it to the GPS interface; it is commonly used now The GPS module generally integrates GPS, compass, safety switch, buzzer, and LED status light. The GPS module should be installed on the bracket and far away from other electronic devices. The installation direction is towards the front of the carrier (the NEO GPS arrow is in the same direction as the flight control arrow)
safety switches
Tip
When you use NEO series GPS, there is no need to install additional safety switches.
If you are flying without GPS, you must connect the switch directly to the GPS1 port to be able to arm and fly the drone. (If you use the old 6-pin GPS, please check the interface definition at the bottom to change the line.)
Buzzer
Tip
When you use NEO series GPS, there is no need to install additional Buzzer.
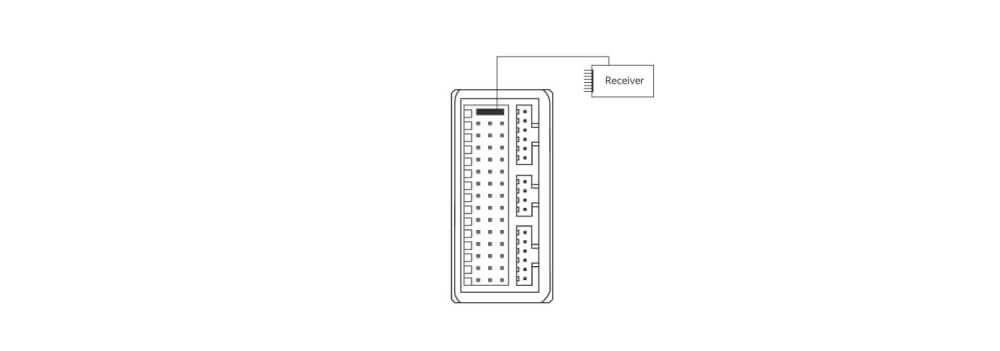
Radio Control
For your flight safety, it is recommended that whether you fly manually or automatically, please connect the handheld remote control (it can be used as an emergency machine, unless you are not proficient in operating the handheld remote control).
The figure below shows how you can connect to your remote control receiver (please find the Dupont cable in the package)
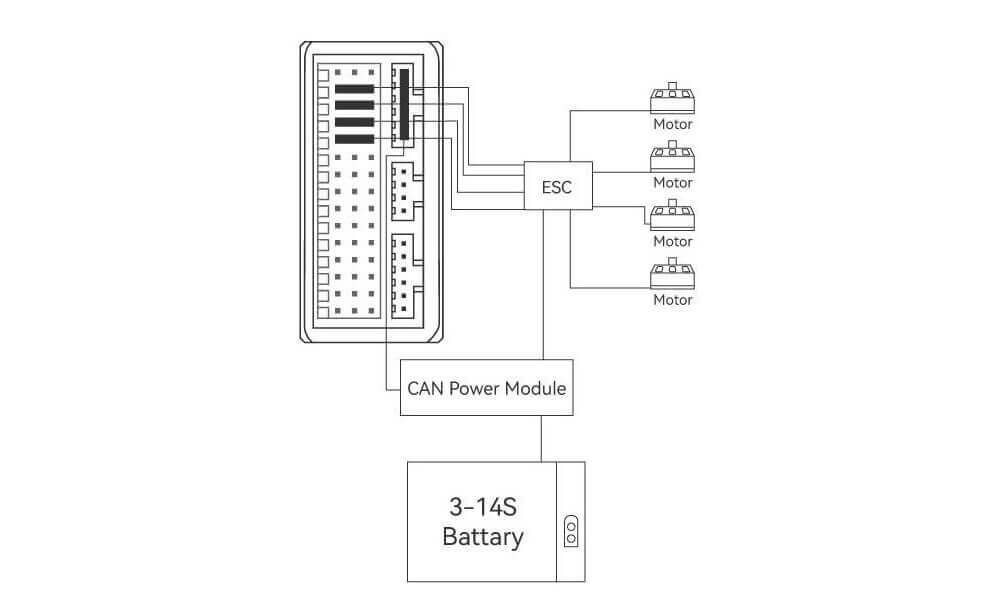
Power
Nora+ is equipped with CAN PMU lite module, it supports 3~14s lithium battery, please connect the 6pin connector of the module to the controller Power C interface
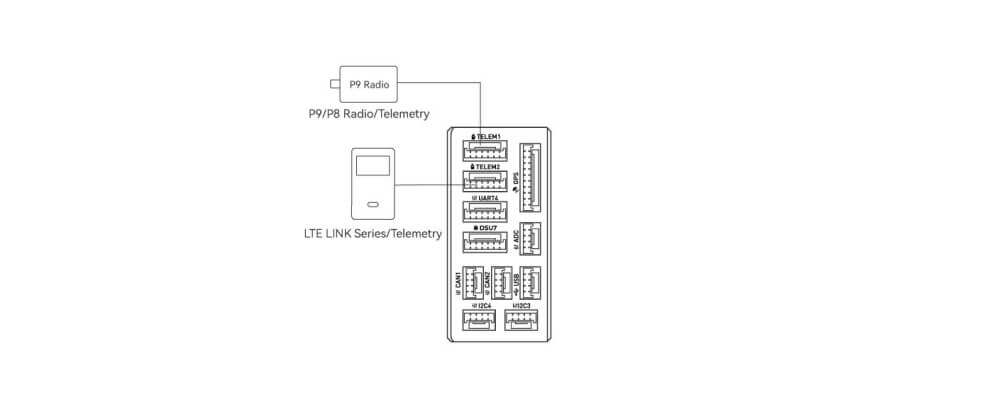
Telemetry (Radio) system
Using the telemetry system, you can communicate with the drone through the ground station software. Monitor and control drones in flight. The airborne end of the telemetry system should be connected to the TELEM1/TELEM2 interface.
SD Card
The SD card is already installed on Nora when it leaves the factory, so you don’t need to install it.
Motors/Servo
The motor/servo system is connected to the M1~M14 ports in the order specified for your carrier in the fuselage reference.
Servo power supply
The servo interface of Nora is completely isolated from the internal power supply of the controller. The controller will not supply power to the steering gear. If you need to supply power to the steering gear, please connect the BEC to any of the positive and negative stages of M1~M14 (M1~M14). The positive and negative times of the two are connected. Then connect the Servo.

Procurement/Purchasing Communication

Laura
E-mail:Laura@cuav.net
WhatsApp:(+86)18078814327

Tina
E-mail:Tina@cuav.net
WhatsApp:(+86)18122367332
